Image

Research Focus
Enable simulation to be used to train, validate, and adapt robot behaviors for the real world.
Enable robots to generalize and share task knowledge that has been taught to them by people.
Enable robots to continually learn, improve, and share skills from experience in the real world.
Enable robots to touch and sense throughout their body and learn by physically interacting with their environments.
Open Source Projects
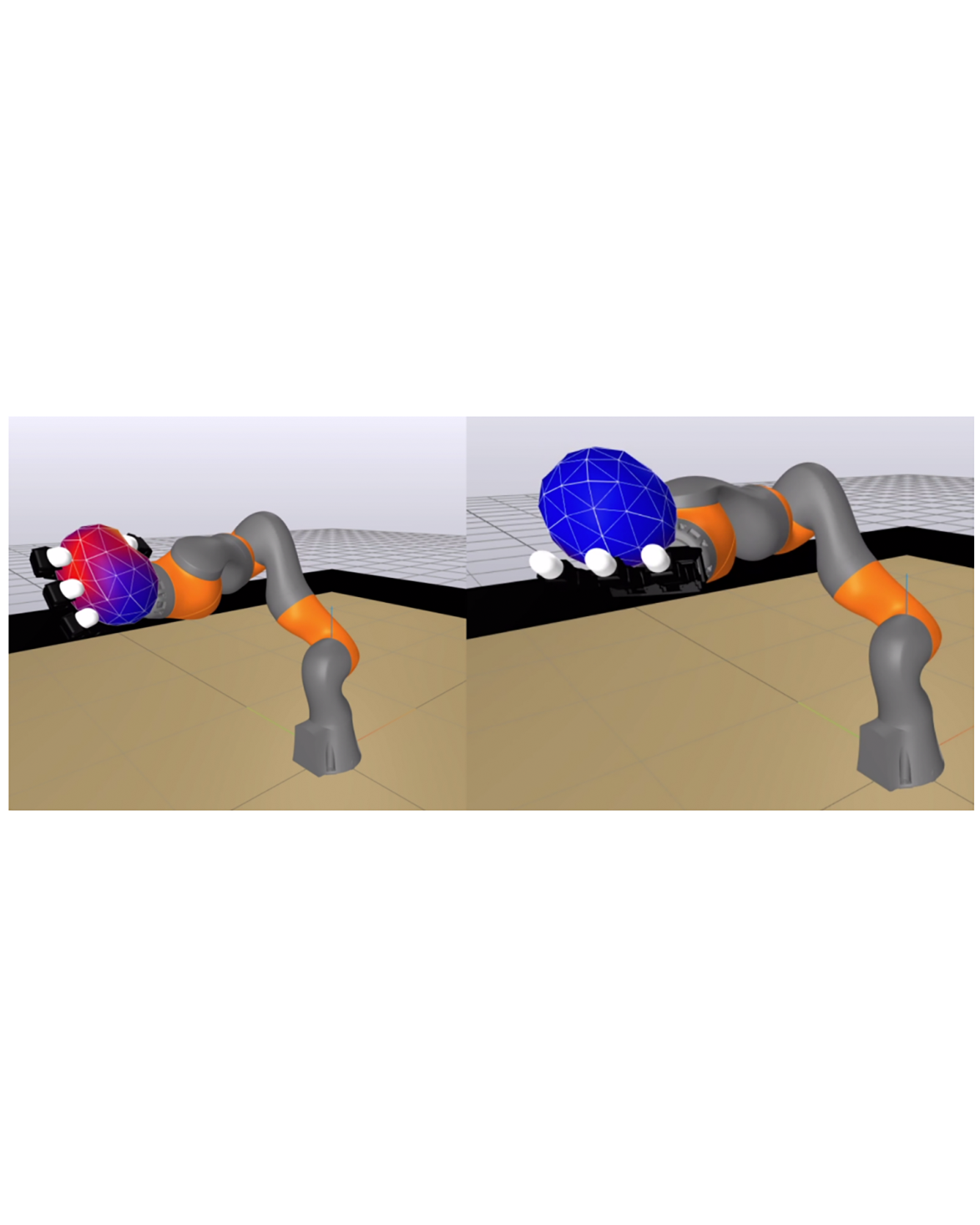
Drake is a C++ toolbox for analyzing the dynamics of our robots and building control systems for them.
Click the image below for more information.

Punyo is a design for a soft bubble gripper that allows for robust and perceptive manipulation.
Click the image below for more information.



Featured Researchers