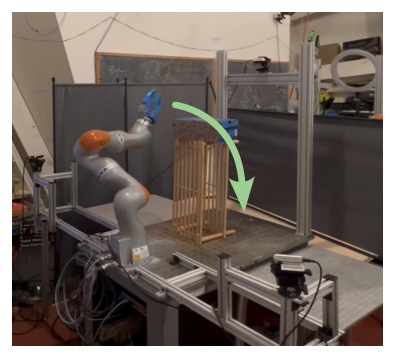
Mobile Manipulation
We demonstrate the technical feasibility of using heterogeneous fleets of general-purpose mobile manipulation prototype robots to perform useful tasks. Our goal is to enable a higher quality of life by amplifying people’s abilities to perform physical tasks in realistic human environments.
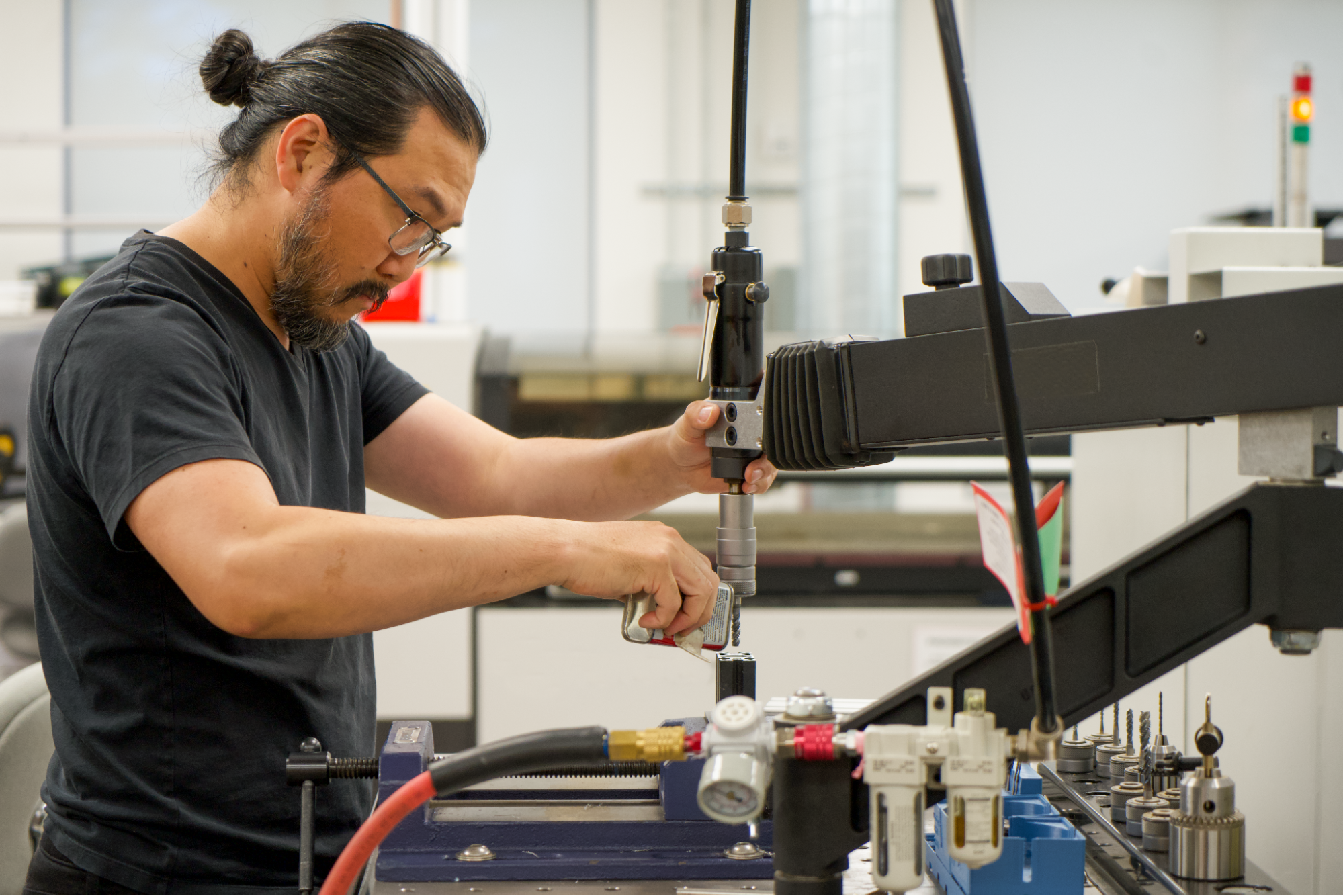
Robotics User Experience
We research, design, and build intuitive human-robot interfaces that amplify human capability and reduce physical and cognitive burden in Toyota’s manufacturing facilities. Our goal is to translate user needs into application requirements and design and deploy simple yet powerful interfaces to TRI’s robots.

Prototyping & Research Operations (PROps)
We accelerate the development of technologies through expertise in hardware development and data collection planning, execution, and post-processing to enable fast iteration design and prototyping cycles.
Opportunity, Discovery, Technology, Adoption (ODTA)
We explore the pathways and partnerships that enable our robotics research to leave the lab and make an impact, leveraging advanced development engineering, market and product research, business development and product-market fit initiatives.