Image
Automated Driving
TRI Author: Nikos Arechiga
All Authors: Nikos Arechiga
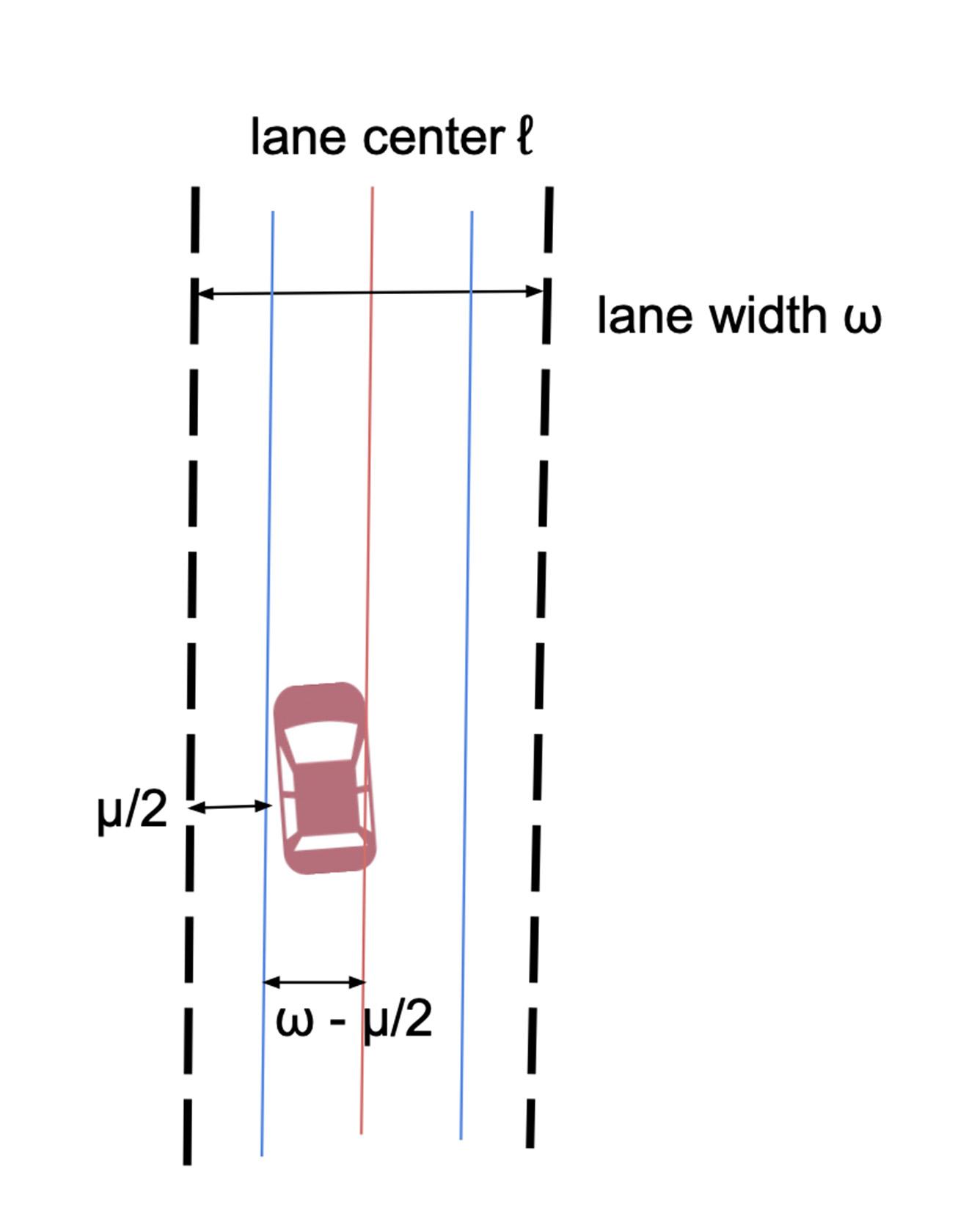
We develop a set of contracts for autonomous control software that ensures that if all traffic participants follow the contracts, the overall traffic system will be collision-free. We express our contracts in Signal Temporal Logic (STL), a lightweight specification language that enables V &V methodologies. We demonstrate how the specification can be used for evaluation of the performance of autonomy software, and We provide preliminary evidence that our contracts are not excessively conservative, i.e., they are not more restrictive than existing guidelines for safe driving by humans. Read more


