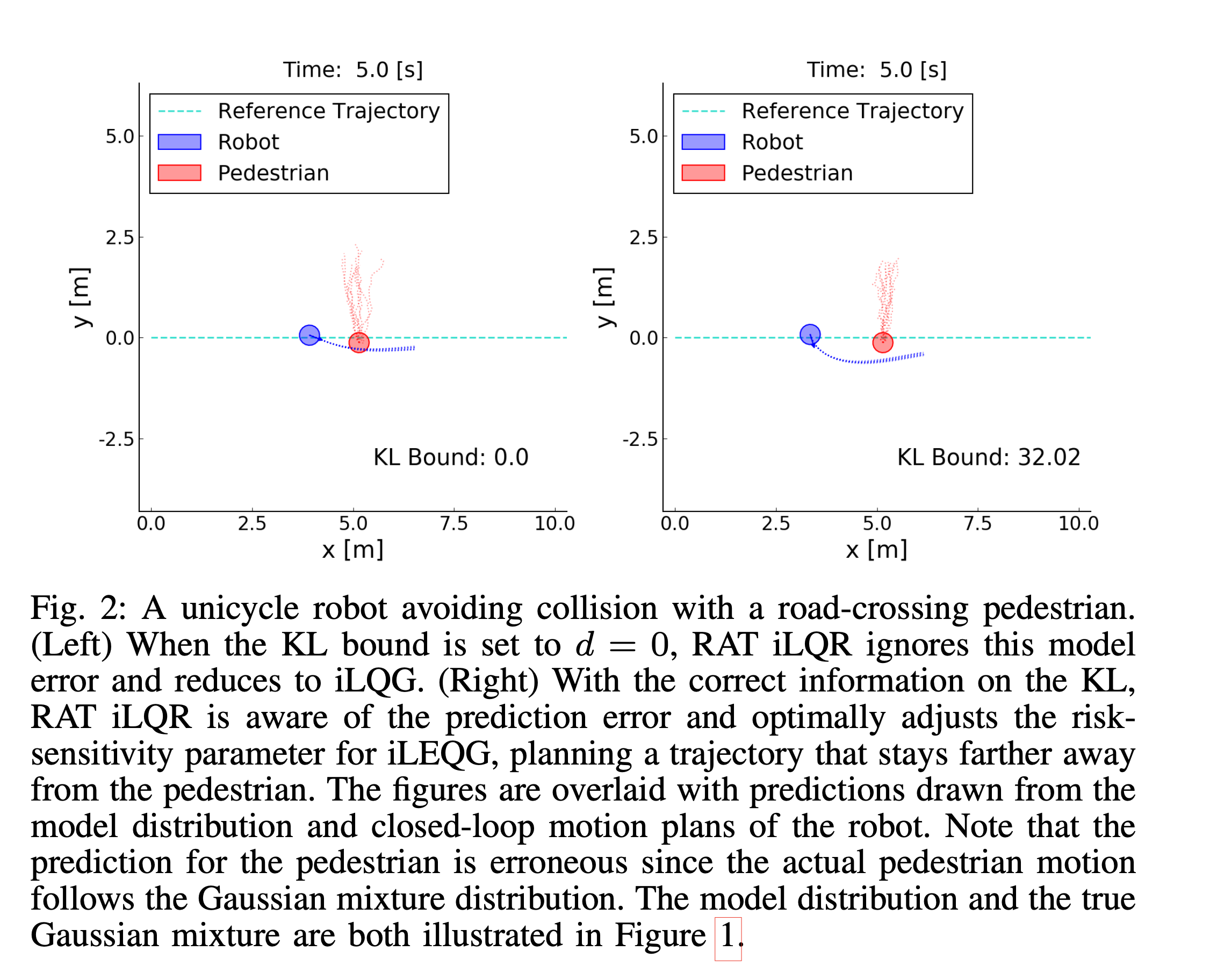
Successful robotic operation in stochastic environ- ments relies on accurate characterization of the underlying probability distributions, yet this is often imperfect due to limited knowledge. This work presents a control algorithm that is capable of handling such distributional mismatches. Specifically, we propose a novel nonlinear MPC for distributionally robust control, which plans locally optimal feedback policies against a worst-case distribution within a given KL divergence bound from a Gaussian distribution. Leveraging mathematical equivalence between distributionally robust control and risk-sensitive optimal control, our framework also provides an algorithm to dynam- ically adjust the risk-sensitivity level online for risk-sensitive control. The benefits of the distributional robustness as well as the automatic risk-sensitivity adjustment are demonstrated in a dynamic collision avoidance scenario where the predictive distribution of human motion is erroneous. READ MORE