TRI Authors: Vitor Guizilini, Jie Li, Rares Ambrus, Adrien Gaidon
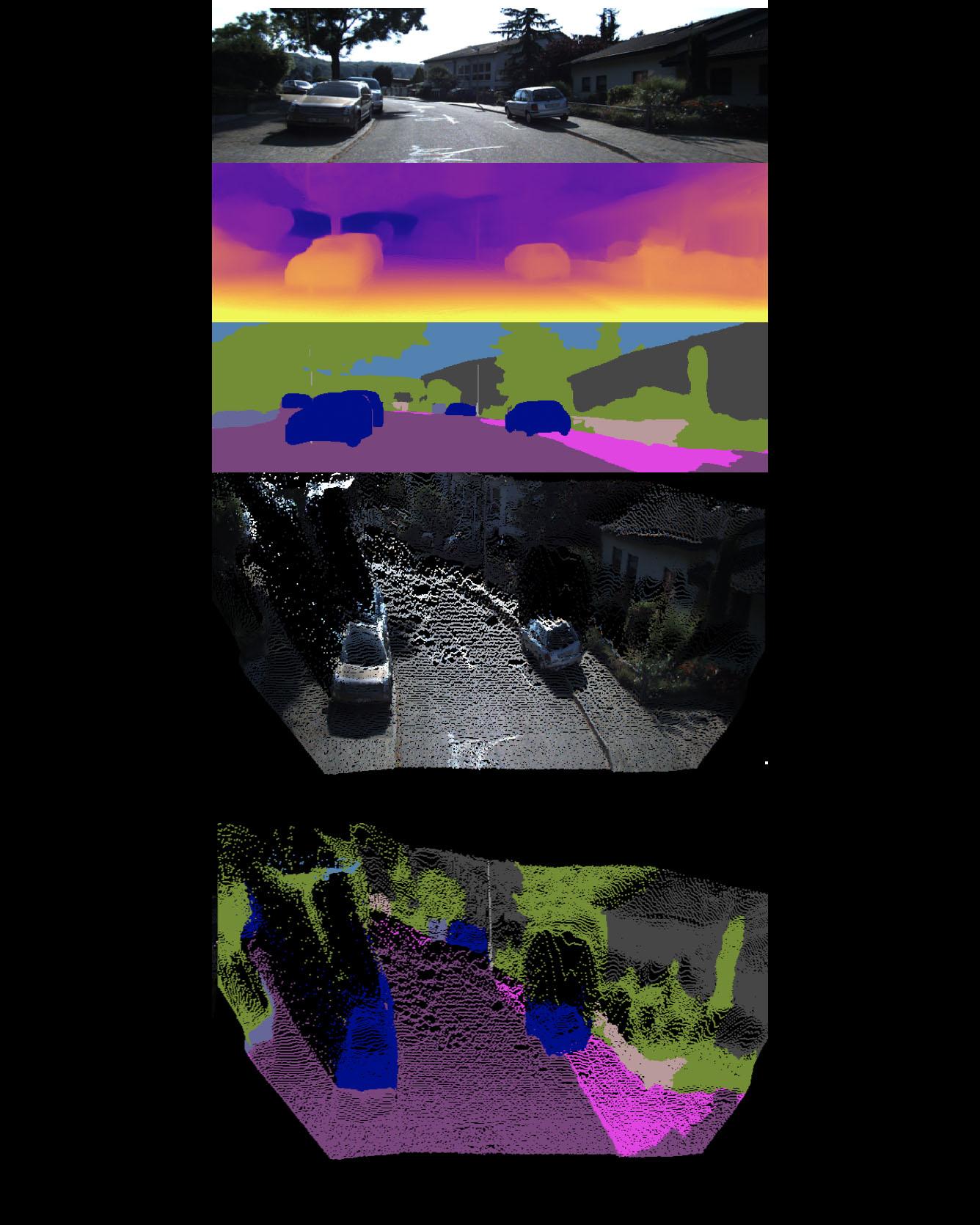
All Authors: Vitor Guizilini, Rui Hou, Jie Li, Rares Ambrus, Adrien Gaidon Self-supervised learning is showing great promise for monocular depth estimation, using geometry as the only source of supervision. Depth networks are indeed capable of learning representations that relate visual appearance to 3D properties by implicitly leveraging category-level patterns. In this work we investigate how to leverage more directly this semantic structure to guide geometric representation learning, while remaining in the self-supervised regime. Instead of using semantic labels and proxy losses in a multi-task approach, we propose a new architecture leveraging fixed pretrained semantic segmentation networks to guide self-supervised representation learning via pixel-adaptive convolutions. Furthermore, we propose a two-stage training process to overcome a common semantic bias on dynamic objects via resampling. Our method improves upon the state of the art for self-supervised monocular depth prediction over all pixels, fine-grained details, and per semantic categories. Read more
Citation: Guizilini, Vitor, Rui Hou, Jie Li, Rares Ambrus, and Adrien Gaidon. "Semantically-Guided Representation Learning for Self-Supervised Monocular Depth." ICLR 2020


