TRI Authors: Stephen G. McGill, Guy Rosman, Luke Fletcher, John J. Leonard
All Authors: Stephen G. McGill, Guy Rosman, Teddy Ort, Alyssa Pierson, Igor Gilischenski, Brandon Araki, Luke Fletcher, Sertac Karaman, Daniela Rus, John J. Leonard
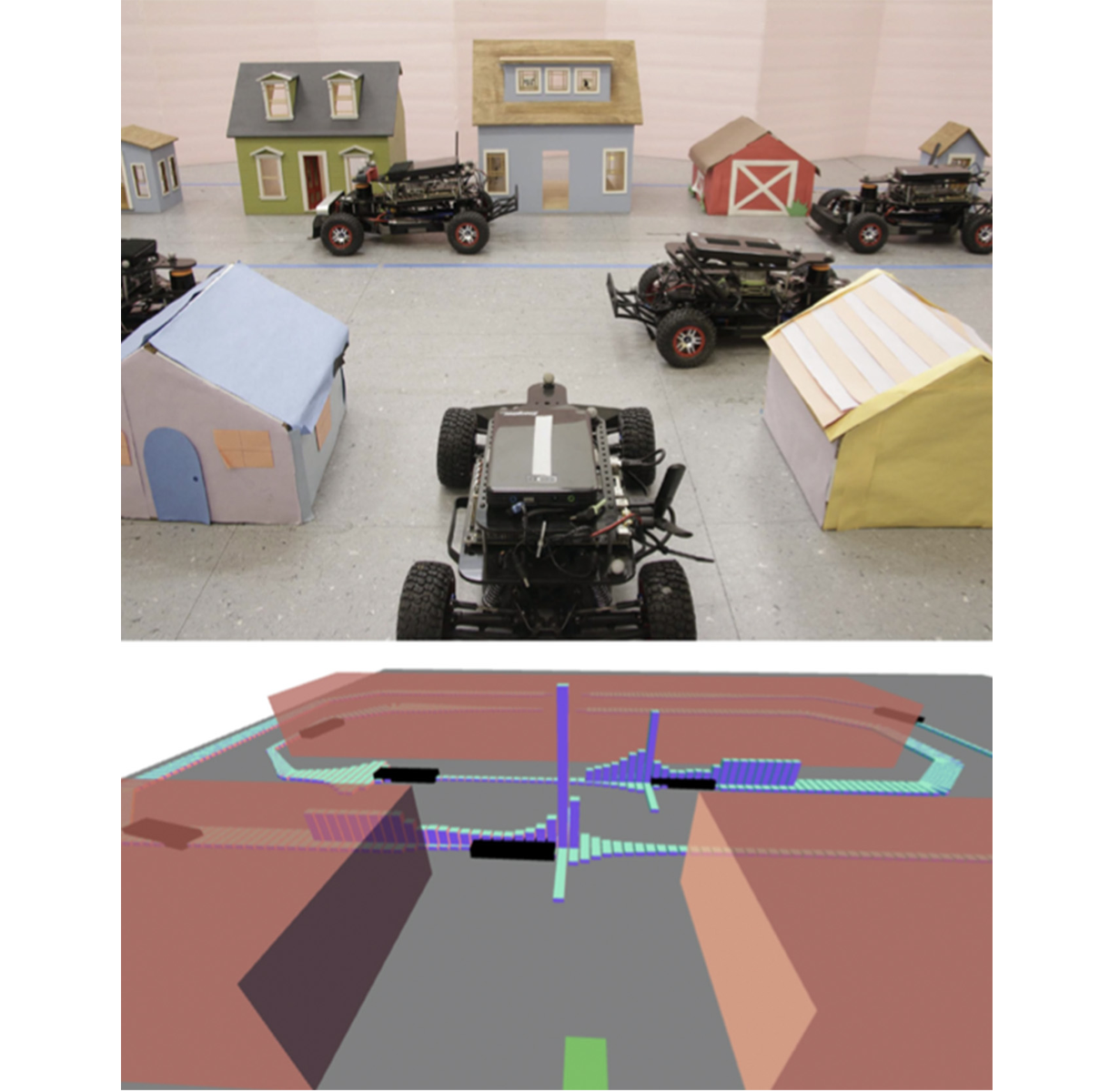
Among traffic accidents in the USA, 23% of fatal and 32% of non-fatal incidents occurred at intersections. For driver assistance systems, intersection navigation remains a difficult problem that is critically important to increasing driver safety. In this letter, we examine how to navigate an unsignalized intersection safely under occlusions and faulty perception. We propose a realtime, probabilistic, risk assessment for parallel autonomy control applications for occluded intersection scenarios. The algorithms are implemented on real hardware and are deployed in a variety of turning and merging topologies. We show phenomena that establish go/no-go decisions, augment acceleration through an intersection and encourage nudging behaviors toward intersections. Read More
Citation: McGill, Stephen, Guy Rosman, Teddy Ort, Alyssa Pierson, Igor Gilischenski, Brandon Araki, Luke Fletcher, Sertac Karaman, Daniela Rus, John J. Leonard. "Probabilistic Safety Metrics for Navigating Occluded Intersections." in International Conference on Intelligent Robots and Systems, IROS 2019, 2019


