TRI Authors: Jiexiong Tang (intern), Hanme Kim, Vitor Guizilini, Sudeep Pillai, Rares Ambrus
All Authors: Jiexiong Tang, Hanme Kim, Vitor Guizilini, Sudeep Pillai, Rares Ambrus
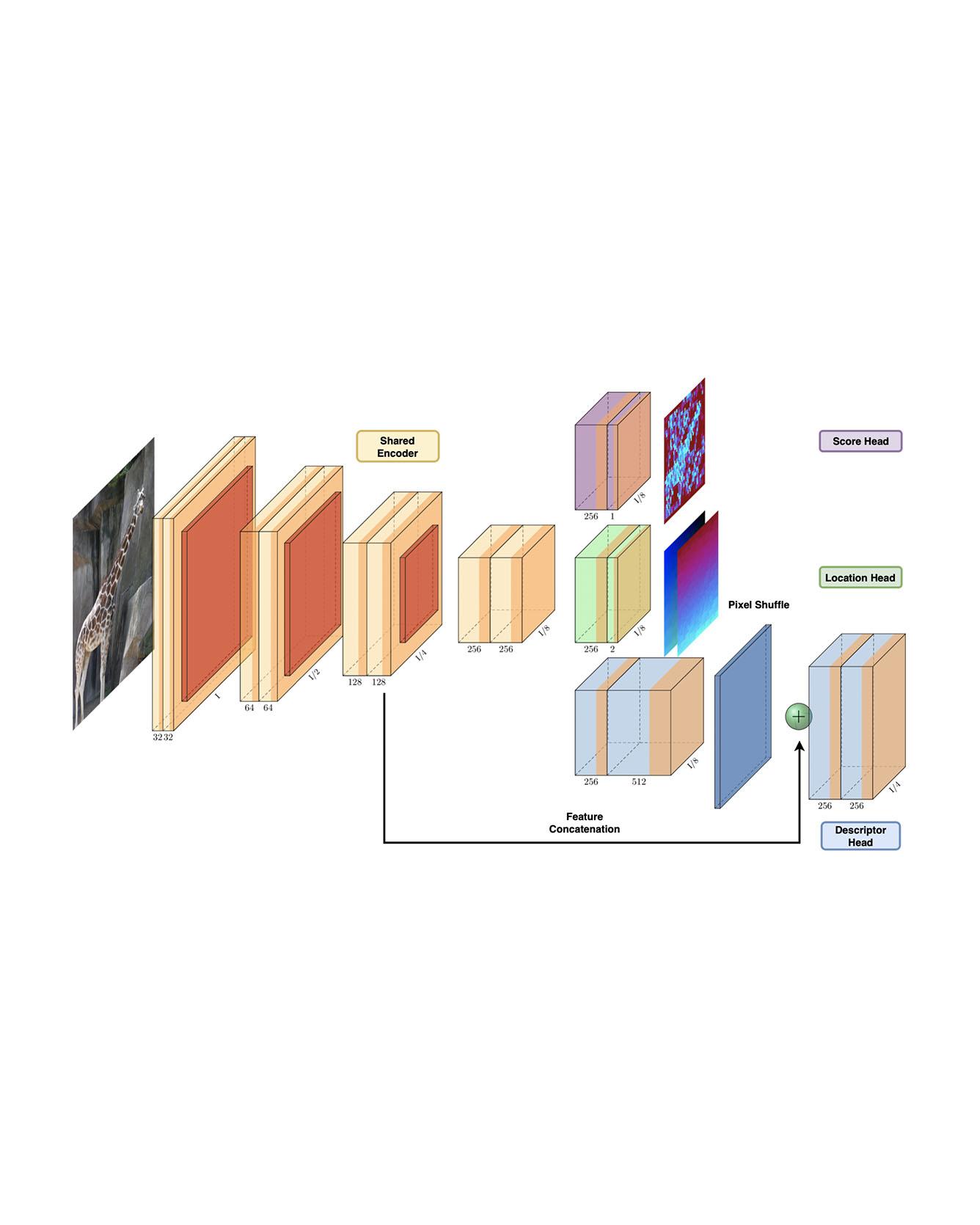
Identifying salient points in images is a crucial component for visual odometry, Structure-from-Motion or SLAM algorithms. Recently, several learned keypoint methods have demonstrated compelling performance on challenging benchmarks. However, generating consistent and accurate training data for interest-point detection in natural images still remains challenging, especially for human annotators. We introduce IO-Net (i.e. InlierOutlierNet), a novel proxy task for the self-supervision of keypoint detection, description and matching. By making the sampling of inlier-outlier sets from point-pair correspondences fully differentiable within the keypoint learning framework, we show that are able to simultaneously self-supervise keypoint description and improve keypoint matching. Second, we introduce KeyPointNet, a keypoint-network architecture that is especially amenable to robust keypoint detection and description. We design the network to allow local keypoint aggregation to avoid artifacts due to spatial discretizations commonly used for this task, and we improve fine-grained keypoint descriptor performance by taking advantage of efficient sub-pixel convolutions to upsample the descriptor feature-maps to a higher operating resolution. Through extensive experiments and ablative analysis, we show that the proposed self-supervised keypoint learning method greatly improves the quality of feature matching and homography estimation on challenging benchmarks over the state-of-the-art. Read More
Citation: Tang, Jiexiong, Hanme Kim, Vitor Guizilini, Sudeep Pillai, and Rares Ambrus. "Neural Outlier Rejection for Self-Supervised Keypoint Learning." ICLR 2020.


