TRI Authors: Kuan-Hui Lee, Adrien Gaidon All Authors: K. Mangalam, H. Girase, S. Agarwal, K-H. Lee, E. Adeli, J. Malik, A. Gaidon
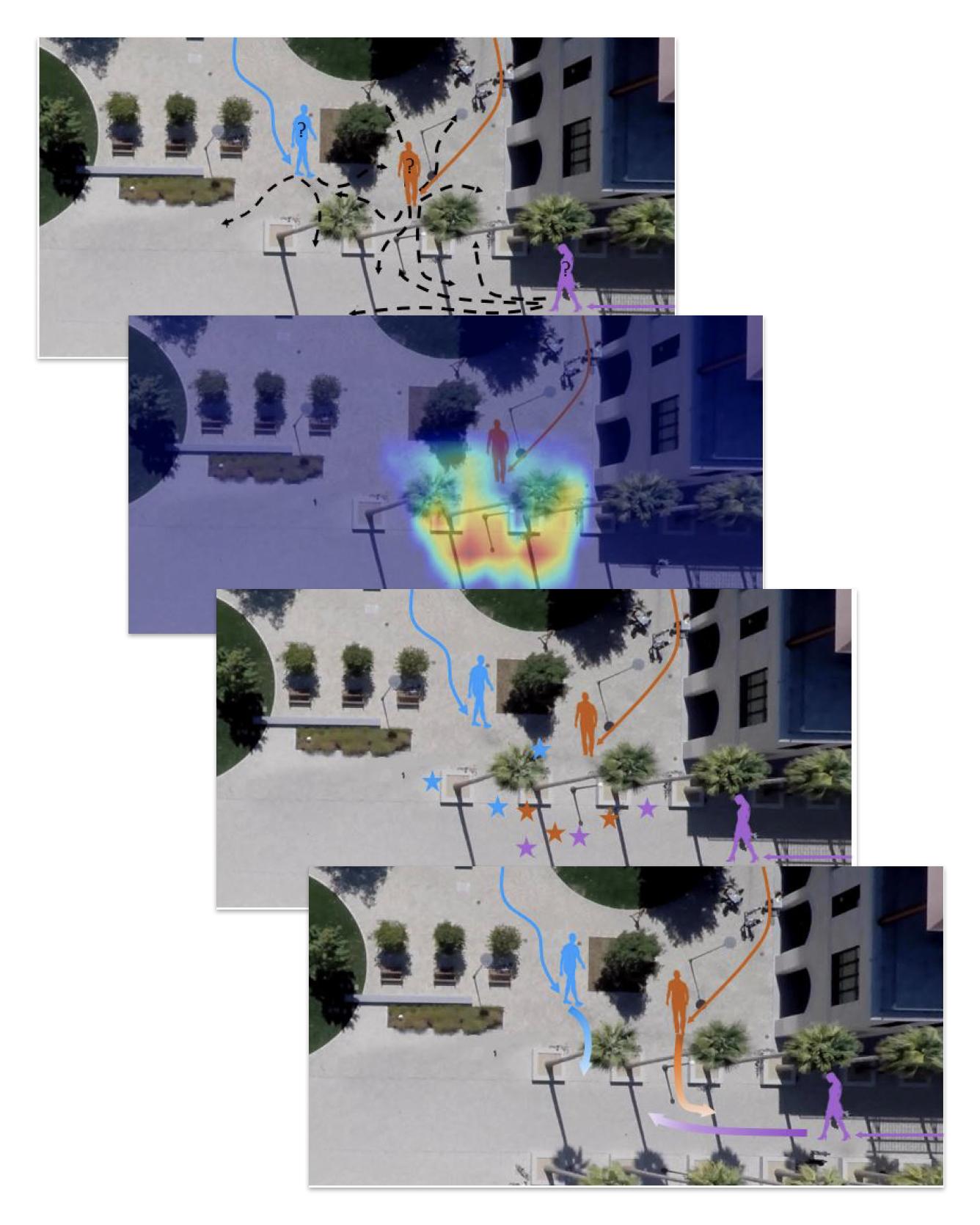
Human trajectory forecasting with multiple socially interacting agents is of critical importance for autonomous navigation in human environments, e.g., for self-driving cars and social robots. In this work, we present Predicted Endpoint Conditioned Network (PECNet) for flexible human trajectory prediction. PECNet infers distant trajectory endpoints to assist in long-range multi-modal trajectory prediction. A novel non-local social pooling layer enables PECNet to infer diverse yet socially compliant trajectories. Additionally, we present a simple "truncation-trick" for improving few-shot multi-modal trajectory prediction performance. We show that PECNet improves state-of-the-art performance on the Stanford Drone trajectory prediction benchmark by ~20.9% and on the ETH/UCY benchmark by ~40.8%. Read more
Citation: Mangalam, Karttikeya, Harshayu Girase, Shreyas Agarwal, Kuan-Hui Lee, Ehsan Adeli, Jitendra Malik, and Adrien Gaidon. "It Is Not the Journey but the Destination: Endpoint Conditioned Trajectory Prediction." ECCV, 2020 arXiv preprint arXiv:2004.02025 (2020).


