TRI Author: Rares Ambrus
All Authors: Cristiano Premebida, Rares Ambrus, Zoltan-Csaba Marton
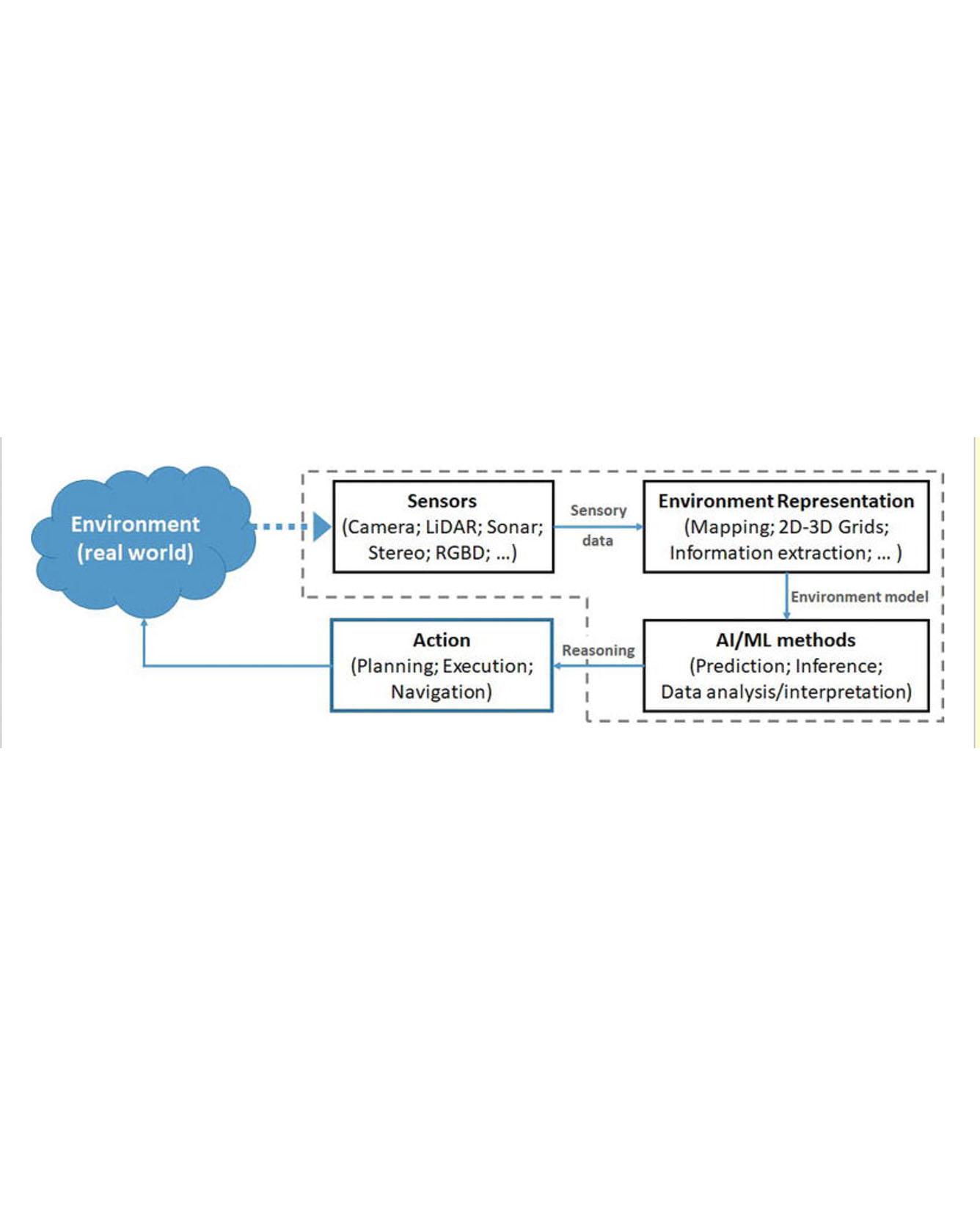
Robotic perception is related to many applications in robotics where sensory data and artificial intelligence/machine learning (AI/ML) techniques are involved. Examples of such applications are object detection, environment representation, scene understanding, human/pedestrian detection, activity recognition, semantic place classification, object modeling, among others. Robotic perception, in the scope of this chapter, encompasses the ML algorithms and techniques that empower robots to learn from sensory data and, based on learned models, to react and take decisions accordingly. The recent developments in machine learning, namely deep-learning approaches, are evident and, consequently, robotic perception systems are evolving in a way that new applications and tasks are becoming a reality. Recent advances in human-robot interaction, complex robotic tasks, intelligent reasoning, and decision-making are, at some extent, the results of the notorious evolution and success of ML algorithms. This chapter will cover recent and emerging topics and use-cases related to intelligent perception systems in robotics. Read More
Citation:Premebida, Cristiano, Rares Ambrus, and Zoltan-Csaba Marton. "Intelligent Robotic Perception Systems." In Applications of Mobile Robots. IntechOpen, 2018.


