Featured Publications

All Publications
TRI Author: Muratahan Aykol
All Authors: Daniel P Tabor, Loïc M Roch, Semion K Saikin, Christoph Kreisbeck, Dennis Sheberla, Joseph H Montoya, Shyam Dwaraknath, Muratahan Aykol, Carlos Ortiz, Hermann Tribukait, Carlos Amador-Bedolla, Christoph J Brabec, Benji Maruyama, Kristin A Persson, Alán Aspuru-Guzik
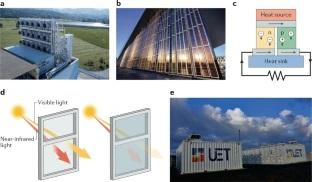
The discovery and development of novel materials in the field of energy are essential to accelerate the transition to a low-carbon economy. Bringing recent technological innovations in automation, robotics and computer science together with current approaches in chemistry, materials synthesis and characterization will act as a catalyst for revolutionizing traditional research and development in both industry and academia. This Perspective provides a vision for an integrated artificial intelligence approach towards autonomous materials discovery, which, in our opinion, will emerge within the next 5 to 10 years. The approach we discuss requires the integration of the following tools, which have already seen substantial development to date: high-throughput virtual screening, automated synthesis planning, automated laboratories and machine learning algorithms. In addition to reducing the time to deployment of new materials by an order of magnitude, this integrated approach is expected to lower the cost associated with the initial discovery. Thus, the price of the final products (for example, solar panels, batteries and electric vehicles) will also decrease. This in turn will enable industries and governments to meet more ambitious targets in terms of reducing greenhouse gas emissions at a faster pace. Read More
Citation: Tabor, Daniel P., Loïc M. Roch, Semion K. Saikin, Christoph Kreisbeck, Dennis Sheberla, Joseph H. Montoya, Shyam Dwaraknath et al. "Accelerating the discovery of materials for clean energy in the era of smart automation." Nature Reviews Materials 3, no. 5 (2018): 5-20.
TRI Authors: Simon Stent, Luke Fletcher All Authors: John Gideon, Simon Stent, Luke Fletcher We present a system for the detection of elevated levels of driver alertness in driver-facing video captured from multiple viewpoints. This problem is important in automotive safety as a helpful feedback signal to determine driver engagement and as a means of automatically flagging anomalous driving events. We generated a dataset of videos from 25 participants overseeing an hour each of driving sequences in a simulator consisting of a mixture of normal and near-miss driving events. Our proposed system consists of a deep neural network which fuses information from three driver-facing cameras to estimate moments of elevated driver alertness. A novel aspect of the system is that it learns to actively re-weight the importance of camera inputs depending on their content. We demonstrate that this approach is not only resilient to dropped or occluded frames, but also has significantly improved performance compared to a system trained on any single stream. Read more
Citation: Gideon, John, Simon Stent, and Luke Fletcher. "A Multi-Camera Deep Neural Network for Detecting Elevated Alertness in Drivers." In 2018 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), pp. 2931-2935. IEEE, 2018.

TRI Author: Katherine M. Tsui
All Authors: Suresh Kumaar Jayaraman, Chandler Creech, Lionel P. Robert Jr., Dawn M. Tilbury, X Jessie Yang, Anuj K. Pradhan, Katherine M. Tsui
Autonomous vehicles (AVs) have the potential to improve road safety. Trust in AVs, especially among pedestrians, is vital to alleviate public skepticism. Yet much of the research has focused on trust between the AV and its driver/passengers. To address this shortcoming, we examined the interactions between AVs and pedestrians using uncertainty reduction theory (URT). We empirically verified this model with a user study in an immersive virtual reality environment (IVE). The study manipulated two factors: AV driving behavior (defensive, normal and aggressive) and the traffic situation (signalized and unsignalized). Results suggest that the impact of aggressive driving on trust in AVs depends on the type of crosswalk. At signalized crosswalks the AV»s driving behavior had little impact on trust, but at unsignalized crosswalks the AV»s driving behavior was a major determinant of trust. Our findings shed new insights on trust between AVs and pedestrians. Read more
Citation: Jayaraman, Suresh Kumaar, Chandler Creech, Lionel P. Robert Jr, Dawn M. Tilbury, X. Jessie Yang, Anuj K. Pradhan, and Katherine M. Tsui. "Trust in AV: An uncertainty reduction model of AV-pedestrian interactions." In Companion of the 2018 ACM/IEEE International Conference on Human-Robot Interaction, pp. 133-134. 2018.
TRI Authors: Astrid Jackson, Brandon D. Northcutt
All Authors: Astrid Jackson, Brandon D. Northcutt, Gita Sukthankar
One of the advantages of teaching robots by demonstration is that it can be more intuitive for users to demonstrate rather than describe the desired robot behavior. However, when the human demonstrates the task through an interface, the training data may inadvertently acquire artifacts unique to the interface, not the desired execution of the task. Being able to use one»s own body usually leads to more natural demonstrations, but those examples can be more difficult to translate to robot control policies. This paper quantifies the benefits of using a virtual reality system that allows human demonstrators to use their own body to perform complex manipulation tasks. We show that our system generates superior demonstrations for a deep neural network without introducing a correspondence problem. The effectiveness of this approach is validated by comparing the learned policy to that of a policy learned from data collected via a Sony Play Station~3 (PS3) DualShock 3 wireless controller. Read more
Citation: Jackson, Astrid, Brandon D. Northcutt, and Gita Sukthankar. "The Benefits of Teaching Robots using VR Demonstrations." In Companion of the 2018 ACM/IEEE International Conference on Human-Robot Interaction, pp. 129-130. 2018.
TRI Authors: Paul Ozog, Ryan W. Wolcott, Jeffrey M. Walls
All Authors: Fernando Nobre, Christoffer Heckman, Paul Ozog, Ryan W Wolcott, Jeffrey M Walls
Sparse feature-based maps provide a compact representation of the environment that admit efficient algorithms, for example simultaneous localization and mapping. These representations typically assume a static world and therefore contain static map features. However, since the world contains dynamic elements, determining when map features no longer correspond to the environment is essential for long-term utility. This work develops a feature-based model of the environment which evolves over time through feature persistence. Moreover, we augment the state-of-the-art sparse mapping model with a correlative structure that captures spatio-temporal properties, e.g. that nearby features frequently have similar persistence. We show that such relationships, typically addressed through an ad hoc formalism focusing only on feature repeatability, are crucial to evaluate through a probabilistically principled approach. The joint posterior over feature persistence can be computed efficiently and used to improve online data association decisions for localization. The proposed algorithms are validated in numerical simulation and using publicly available data sets. Read More
Citation: Nobre, Fernando, Christoffer Heckman, Paul Ozog, Ryan W. Wolcott, and Jeffrey M. Walls. "Online probabilistic change detection in feature-based maps." In 2018 IEEE International Conference on Robotics and Automation (ICRA), pp. 1-9. IEEE, 2018.
TRI Authors: Kuan-Hui Lee, Adrien Gaidon
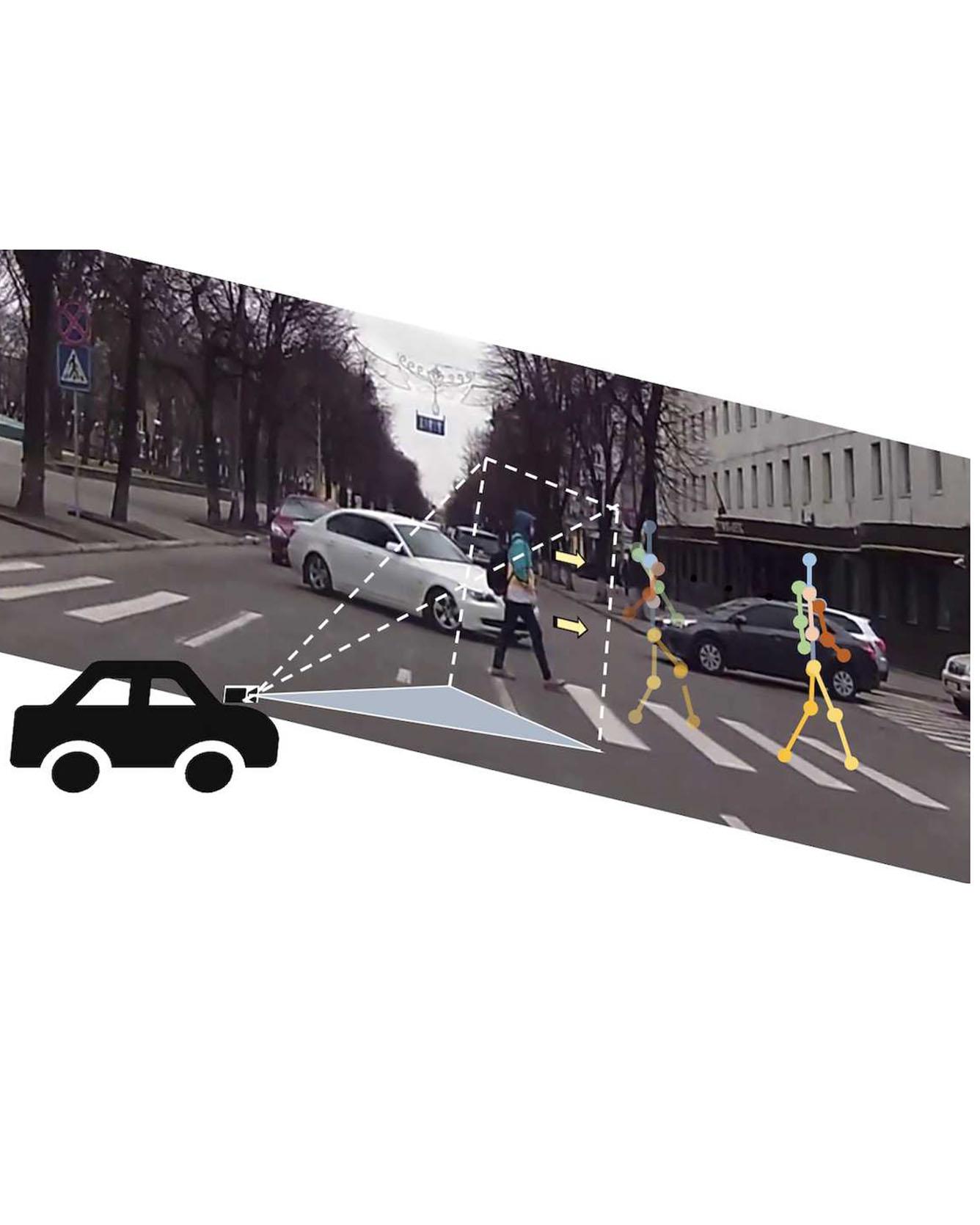
All Authors: Karttikeya Mangalam, Ehsan Adeli, Kuan-Hui Lee, Adrien Gaidon, and Juan Carlos Niebles We tackle the problem of Human Locomotion Forecasting, a task for jointly predicting the spatial positions of several keypoints on human body in the near future under an egocentric setting. In contrast to the previous work that aims to solve either the task of pose prediction or trajectory forecasting in isolation, we propose a framework to unify these two problems and address the practically useful task of pedestrian locomotion prediction in the wild. Among the major challenges in solving this task is the scarcity of annotated egocentric video datasets with dense annotations for pose, depth, or egomotion. To surmount this difficulty, we use state-of-the-art models to generate (noisy) annotations and propose robust forecasting models that can learn from this noisy supervision. We present a method to disentangle the overall pedestrian motion into easier to learn subparts by utilizing a pose completion and a decomposition module. The completion module fills in the missing key-point annotations and the decomposition module breaks the cleaned locomotion down to global (trajectory) and local (pose keypoint movements). Further, with Quasi RNN as our backbone, we propose a novel hierarchical trajectory forecasting network that utilizes low-level vision domain specific signals like egomotion and depth to predict the global trajectory. Our method leads to state-of-the-art results for the prediction of human locomotion in the egocentric view. Read more
Citations: Mangalam, Karttikeya, Ehsan Adeli, Kuan-Hui Lee, Adrien Gaidon, and Juan Carlos Niebles. "Disentangling human dynamics for pedestrian locomotion forecasting with noisy supervision." In The IEEE Winter Conference on Applications of Computer Vision, pp. 2784-2793. 2020.
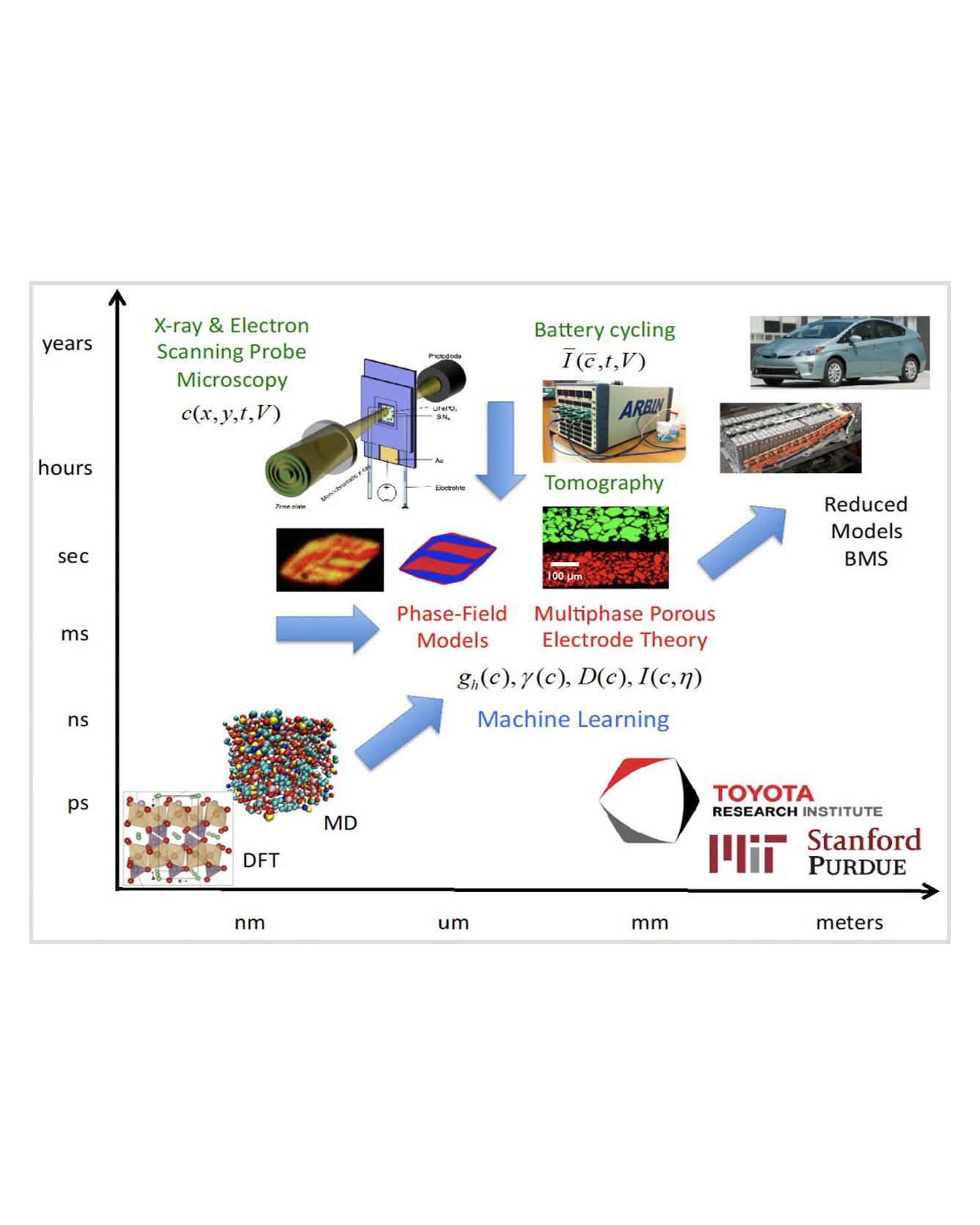
TRI Authors: Patrick H. Herring, Muratahan Aykol
All Authors: Peter Attia, Aditya Grover, Norman Jin, Kristen Severson, Bryan Cheong, Jerry Liao, Michael H Chen, Nicholas Perkins, Zi Yang, Patrick H Herring, Muratahan Aykol, Stephen J Harris, Richard D Braatz, Stefano Ermon, William C Chueh Lithium-ion batteries are complex electrochemical devices that spans multiple time and length scales. Such complexity presents challenges when engineering batteries. On a scientific level, establishing a physical picture that spans atomic, particle and device scales require integration of many types of data, physics/chemistry, and equations. On an engineering level, given the degrees of freedom, design of experiments can involve daunting number of permutations. The Center for Data-Driven Design of Li-Ion Batteries (D3BATT) at MIT, Stanford and Purdue aims to address these challenges by integrating a wide range of experiments, modeling, and data analytic approaches. In this talk, I will highlight the example of optimizing extreme fast charging, that is, charging batteries under ten minutes. We combined machine-learning and optimal experimental design methods to rapidly identify an effective extreme fast charging method on a time scale that is otherwise not possible. Read More
Citation: Attia, Peter, Aditya Grover, Norman Jin, Kristen Severson, Bryan Cheong, Jerry Liao, Michael H. Chen et al. "Closed-Loop Optimization of Battery Fast Charging Procedures." In Meeting Abstracts, no. 2, pp. 227-227. The Electrochemical Society, 2019.