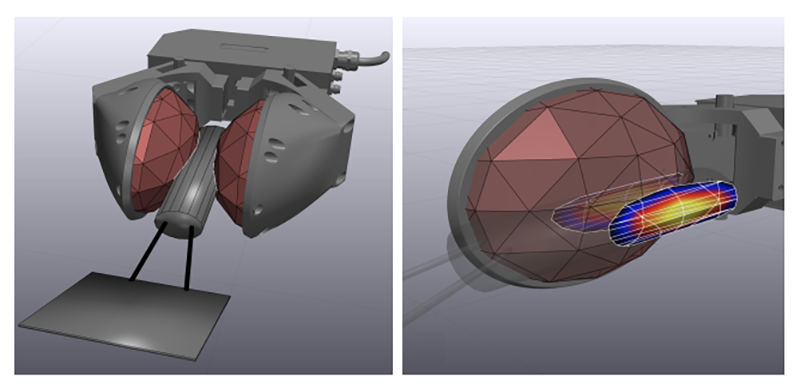
Pressure Field Contact (PFC) was recently introduced as a method for detailed modeling of contact interface regions at rates much faster than elasticity-theory models, while at the same time predicting essential trends and capturing rich contact behavior. The PFC model was designed to work in conjunction with error-controlled integration at the acceleration level. Therefore a vast majority of existent multibody codes using solvers at the velocity level cannot incorporate PFC in its original form. In this work we introduce a discrete in time approximation of PFC making it suitable for use with existent velocity-level time steppers and enabling execution at real-time rates. We evaluate the accuracy and performance gains of our approach and demonstrate its effectiveness in simulating relevant manipulation tasks. The method is available in open source as part of Drake’s Hydroelastic Contact model. READ MORE