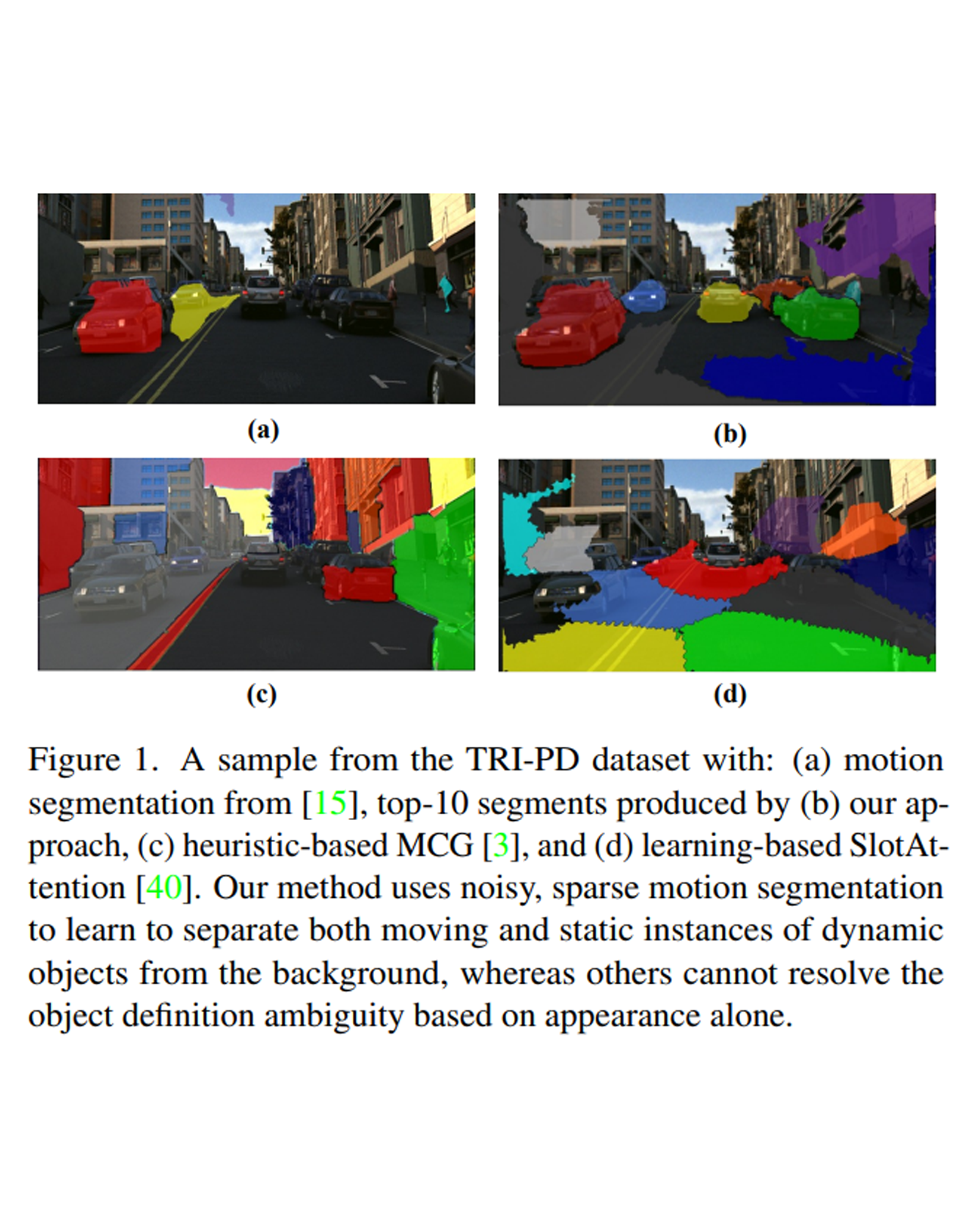
This paper studies the problem of object discovery -- separating objects from the background without manual labels. Existing approaches utilize appearance cues, such as color, texture, and location, to group pixels into object-like regions. However, by relying on appearance alone, these methods fail to separate objects from the background in cluttered scenes. This is a fundamental limitation since the definition of an object is inherently ambiguous and context-dependent. To resolve this ambiguity, we choose to focus on dynamic objects -- entities that can move independently in the world. We then scale the recent auto-encoder based frameworks for unsupervised object discovery from toy synthetic images to complex real-world scenes. To this end, we simplify their architecture, and augment the resulting model with a weak learning signal from general motion segmentation algorithms. Our experiments demonstrate that, despite only capturing a small subset of the objects that move, this signal is enough to generalize to segment both moving and static instances of dynamic objects. We show that our model scales to a newly collected, photo-realistic synthetic dataset with street driving scenarios. Additionally, we leverage ground truth segmentation and flow annotations in this dataset for thorough ablation and evaluation. Finally, our experiments on the real-world KITTI benchmark demonstrate that the proposed approach outperforms both heuristic- and learning-based methods by capitalizing on motion cues. READ MORE