Featured Publications
All Publications
This paper proposes a self-supervised objective for learning representations that localize objects under occlusion - a property known as object permanence. A central question is the choice of learning signal in cases of total occlusion. Rather than directly supervising the locations of invisible objects, we propose a self-supervised objective that requires neither human annotation, nor assumptions about object dynamics. We show that object permanence can emerge by optimizing for temporal coherence of memory: we fit a Markov walk along a space-time graph of memories, where the states in each time step are non-Markovian features from a sequence encoder. This leads to a memory representation that stores occluded objects and predicts their motion, to better localize them. The resulting model outperforms existing approaches on several datasets of increasing complexity and realism, despite requiring minimal supervision, and hence being broadly applicable. READ MORE

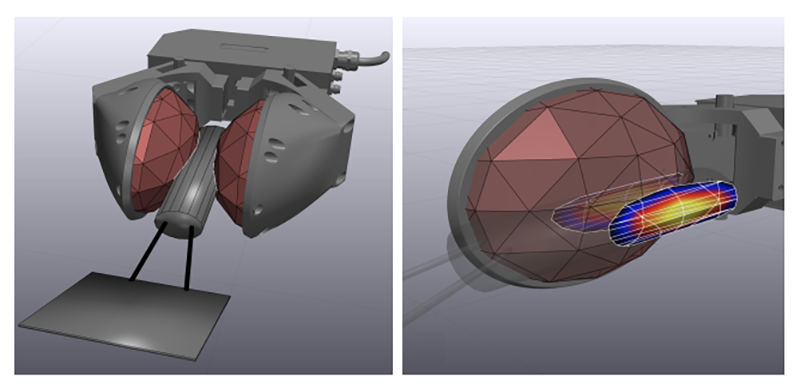
Pressure Field Contact (PFC) was recently introduced as a method for detailed modeling of contact interface regions at rates much faster than elasticity-theory models, while at the same time predicting essential trends and capturing rich contact behavior. The PFC model was designed to work in conjunction with error-controlled integration at the acceleration level. Therefore a vast majority of existent multibody codes using solvers at the velocity level cannot incorporate PFC in its original form. In this work we introduce a discrete in time approximation of PFC making it suitable for use with existent velocity-level time steppers and enabling execution at real-time rates. We evaluate the accuracy and performance gains of our approach and demonstrate its effectiveness in simulating relevant manipulation tasks. The method is available in open source as part of Drake’s Hydroelastic Contact model. READ MORE
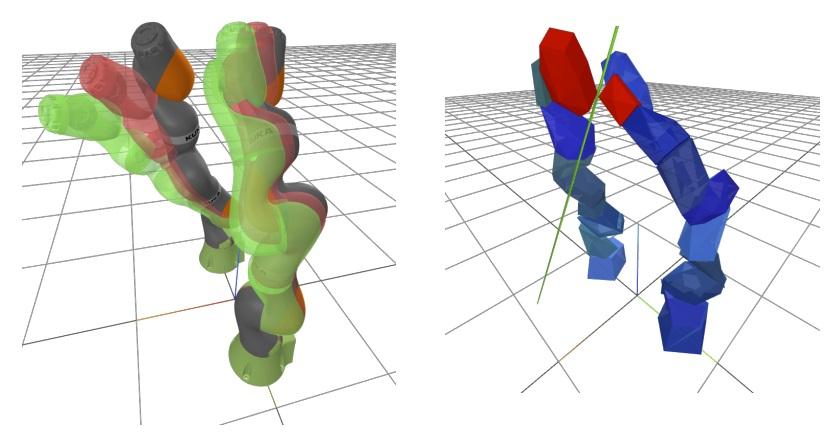
Configuration space (C-space) has played a central role in collision-free motion planning, particularly for robot manipulators. While it is possible to check for collisions at a point using standard algorithms, to date no practical method exists for computing collision-free C-space regions with rigorous certificates due to the complexities of mapping task-space obstacles through the kinematics. In this work, we present the first to our knowledge method for generating such regions and certificates through convex optimization. Our method, called C-Iris (C-space Iterative Regional Inflation by Semidefinite programming), generates large, convex polytopes in a rational parametrization of the configuration space which are guaranteed to be collision-free. Such regions have been shown to be useful for both optimization-based and randomized motion planning. Our regions are generated by alternating between two convex optimization problems: (1) a simultaneous search for a maximal-volume ellipse inscribed in a given polytope and a certificate that the polytope is collision-free and (2) a maximal expansion of the polytope away from the ellipse which does not violate the certificate. The volume of the ellipse and size of the polytope are allowed to grow over several iterations while being collision-free by construction. Our method works in arbitrary dimensions, only makes assumptions about the convexity of the obstacles in the task space, and scales to realistic problems in manipulation. We demonstrate our algorithm's ability to fill a non-trivial amount of collision-free C-space in a 3-DOF example where the C-space can be visualized, as well as the scalability of our algorithm on a 7-DOF KUKA iiwa and a 12-DOF bimanual manipulator. READ MORE
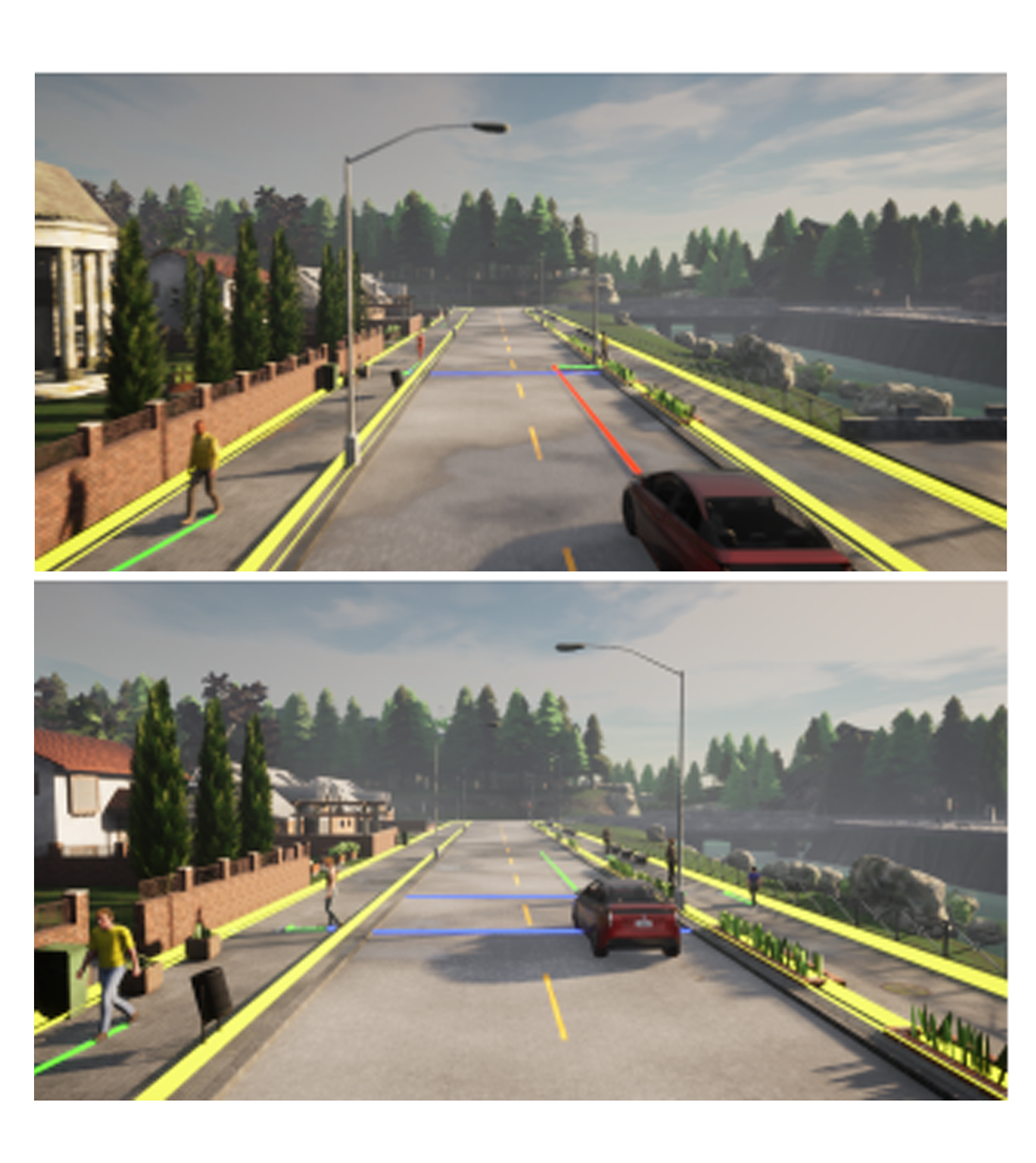
Autonomous vehicle software is typically structured as a modular pipeline of individual components (e.g., perception, prediction, and planning) to help separate concerns into interpretable sub-tasks. Even when end-to-end training is possible, each module has its own set of objectives used for safety assurance, sample efficiency, regularization, or interpretability. However, intermediate objectives do not always align with overall system performance. For example, optimizing the likelihood of a trajectory prediction module might focus more on easy-to-predict agents than safety-critical or rare behaviors (e.g., jaywalking). In this paper, we present control-aware prediction objectives (CAPOs), to evaluate the downstream effect of predictions on control without requiring the planner be differentiable. We propose two types of importance weights that weight the predictive likelihood: one using an attention model between agents, and another based on control variation when exchanging predicted trajectories for ground truth trajectories. Experimentally, we show our objectives improve overall system performance in suburban driving scenarios using the CARLA simulator. READ MORE
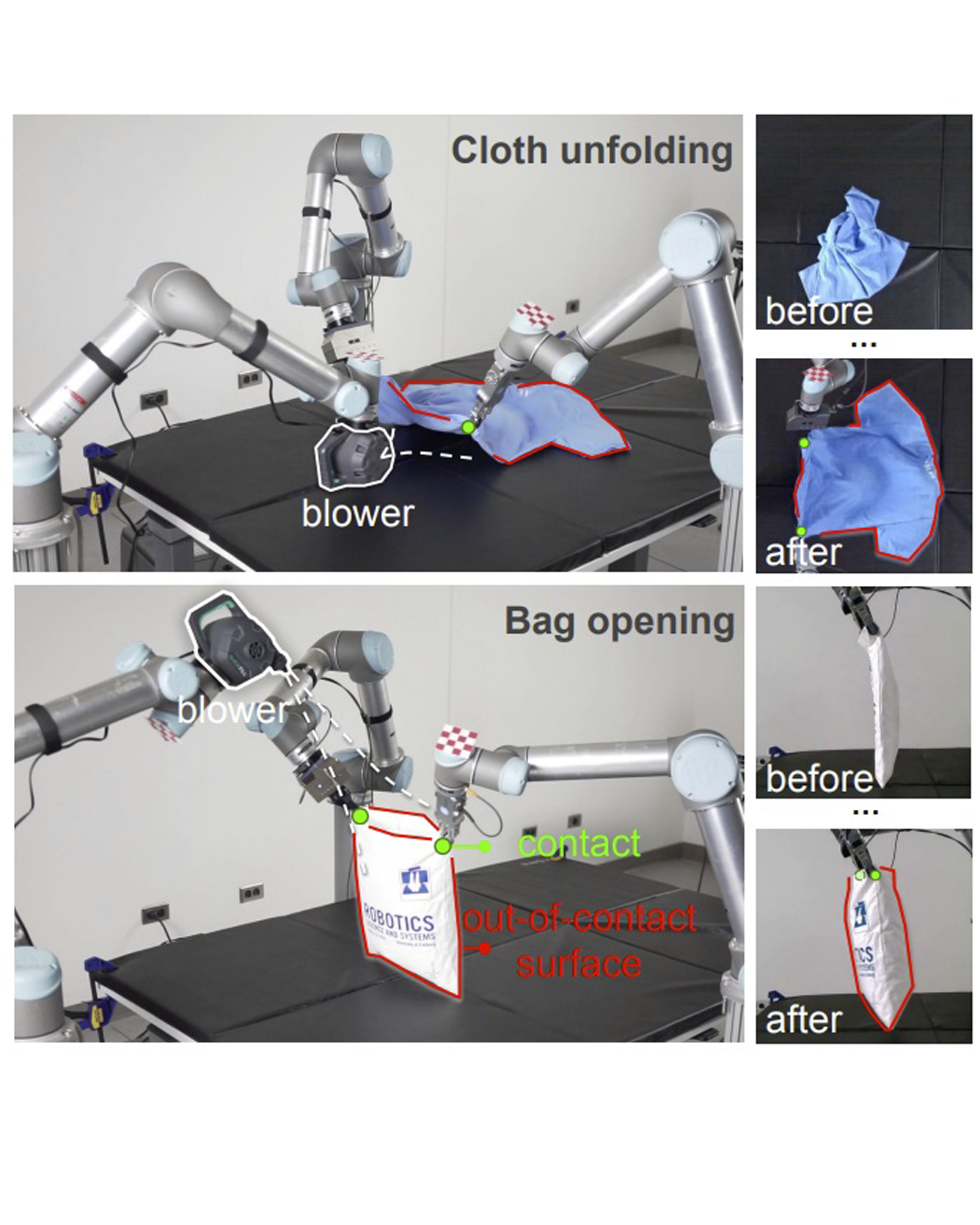
This paper introduces DextAIRity, an approach to manipulate deformable objects using active airflow. In contrast to conventional contact-based quasi-static manipulations, DextAIRity allows the system to apply dense forces on out-of-contact surfaces, expands the system's reach range, and provides safe high-speed interactions. These properties are particularly advantageous when manipulating under-actuated deformable objects with large surface areas or volumes. We demonstrate the effectiveness of DextAIRity through two challenging deformable object manipulation tasks: cloth unfolding and bag opening. We present a self-supervised learning framework that learns to effectively perform a target task through a sequence of grasping or air-based blowing actions. By using a closed-loop formulation for blowing, the system continuously adjusts its blowing direction based on visual feedback in a way that is robust to the highly stochastic dynamics. We deploy our algorithm on a real-world three-arm system and present evidence suggesting that DextAIRity can improve system efficiency for challenging deformable manipulation tasks, such as cloth unfolding, and enable new applications that are impractical to solve with quasi-static contact-based manipulations (e.g., bag opening). READ MORE
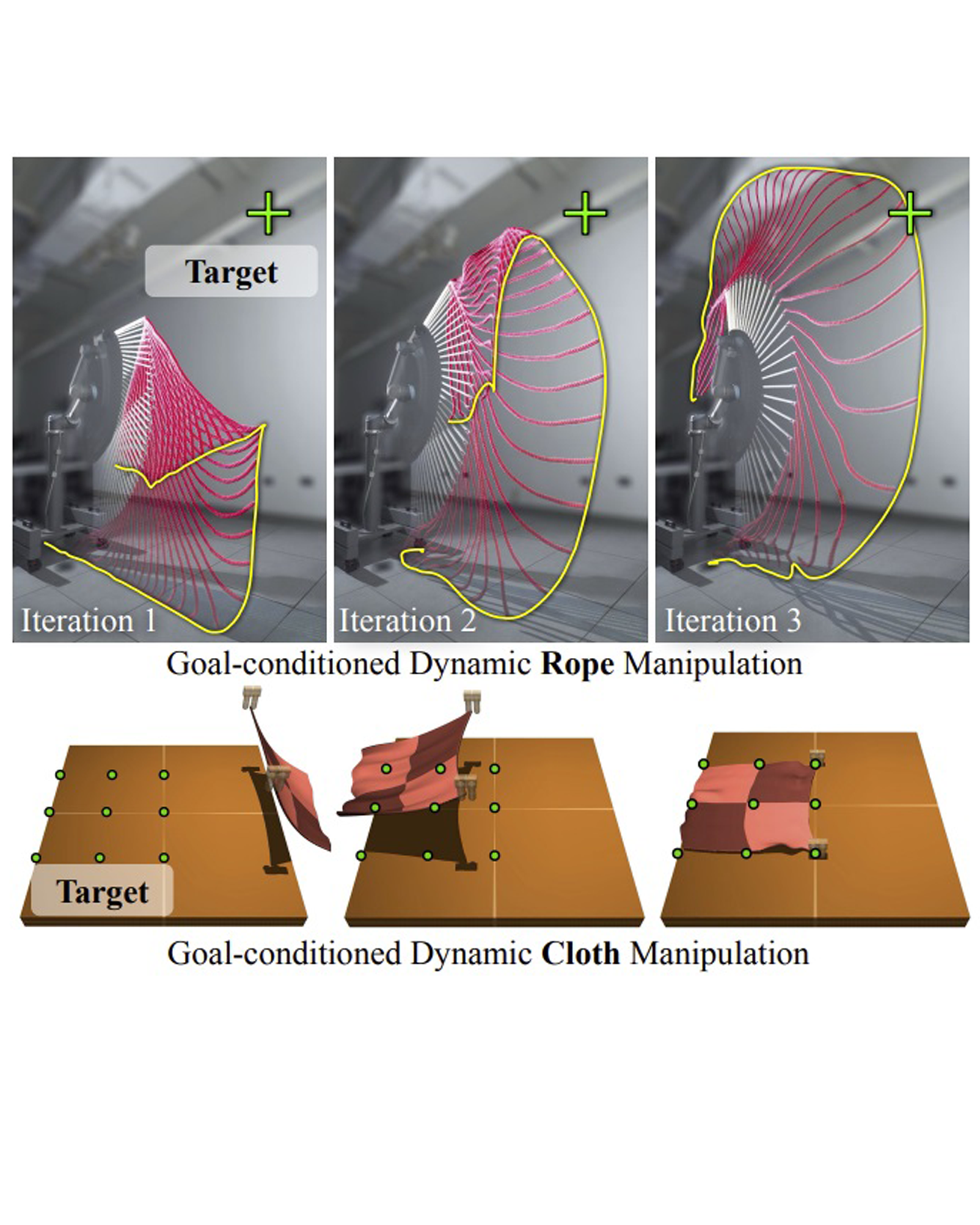
This paper tackles the task of goal-conditioned dynamic manipulation of deformable objects. This task is highly challenging due to its complex dynamics (introduced by object deformation and high-speed action) and strict task requirements (defined by a precise goal specification). To address these challenges, we present Iterative Residual Policy (IRP), a general learning framework applicable to repeatable tasks with complex dynamics. IRP learns an implicit policy via delta dynamics -- instead of modeling the entire dynamical system and inferring actions from that model, IRP learns delta dynamics that predict the effects of delta action on the previously-observed trajectory. When combined with adaptive action sampling, the system can quickly optimize its actions online to reach a specified goal. We demonstrate the effectiveness of IRP on two tasks: whipping a rope to hit a target point and swinging a cloth to reach a target pose. Despite being trained only in simulation on a fixed robot setup, IRP is able to efficiently generalize to noisy real-world dynamics, new objects with unseen physical properties, and even different robot hardware embodiments, demonstrating its excellent generalization capability relative to alternative approaches. READ MORE
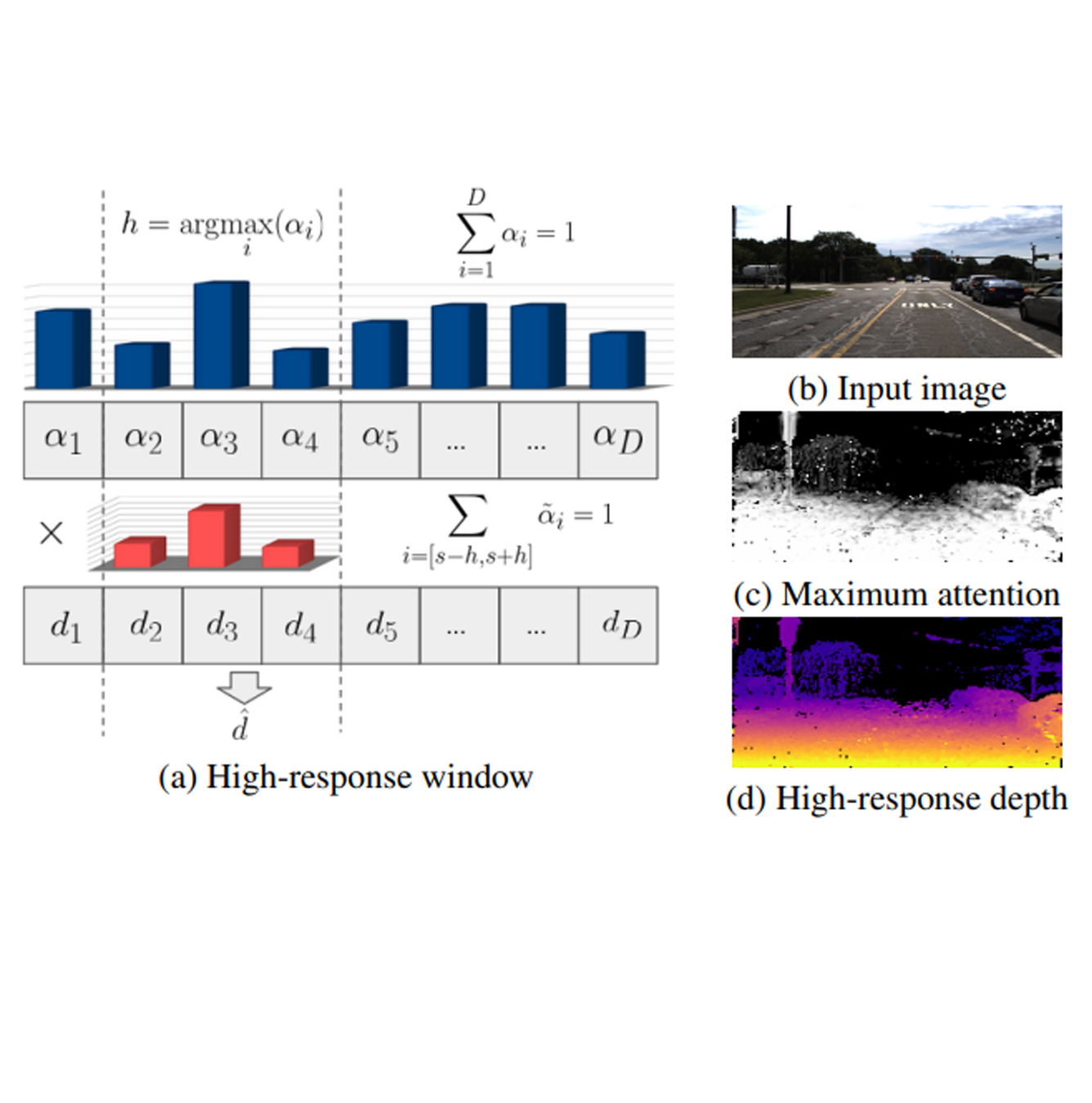
Multi-frame depth estimation improves over single-frame approaches by also leveraging geometric relationships between images via feature matching, in addition to learning appearance-based features. In this paper we revisit feature matching for self-supervised monocular depth estimation, and propose a novel transformer architecture for cost volume generation. We use depth-discretized epipolar sampling to select matching candidates, and refine predictions through a series of self- and cross-attention layers. These layers sharpen the matching probability between pixel features, improving over standard similarity metrics prone to ambiguities and local minima. The refined cost volume is decoded into depth estimates, and the whole pipeline is trained end-to-end from videos using only a photometric objective. Experiments on the KITTI and DDAD datasets show that our DepthFormer architecture establishes a new state of the art in self-supervised monocular depth estimation, and is even competitive with highly specialized supervised single-frame architectures. We also show that our learned cross-attention network yields representations transferable across datasets, increasing the effectiveness of pre-training strategies. READ MORE
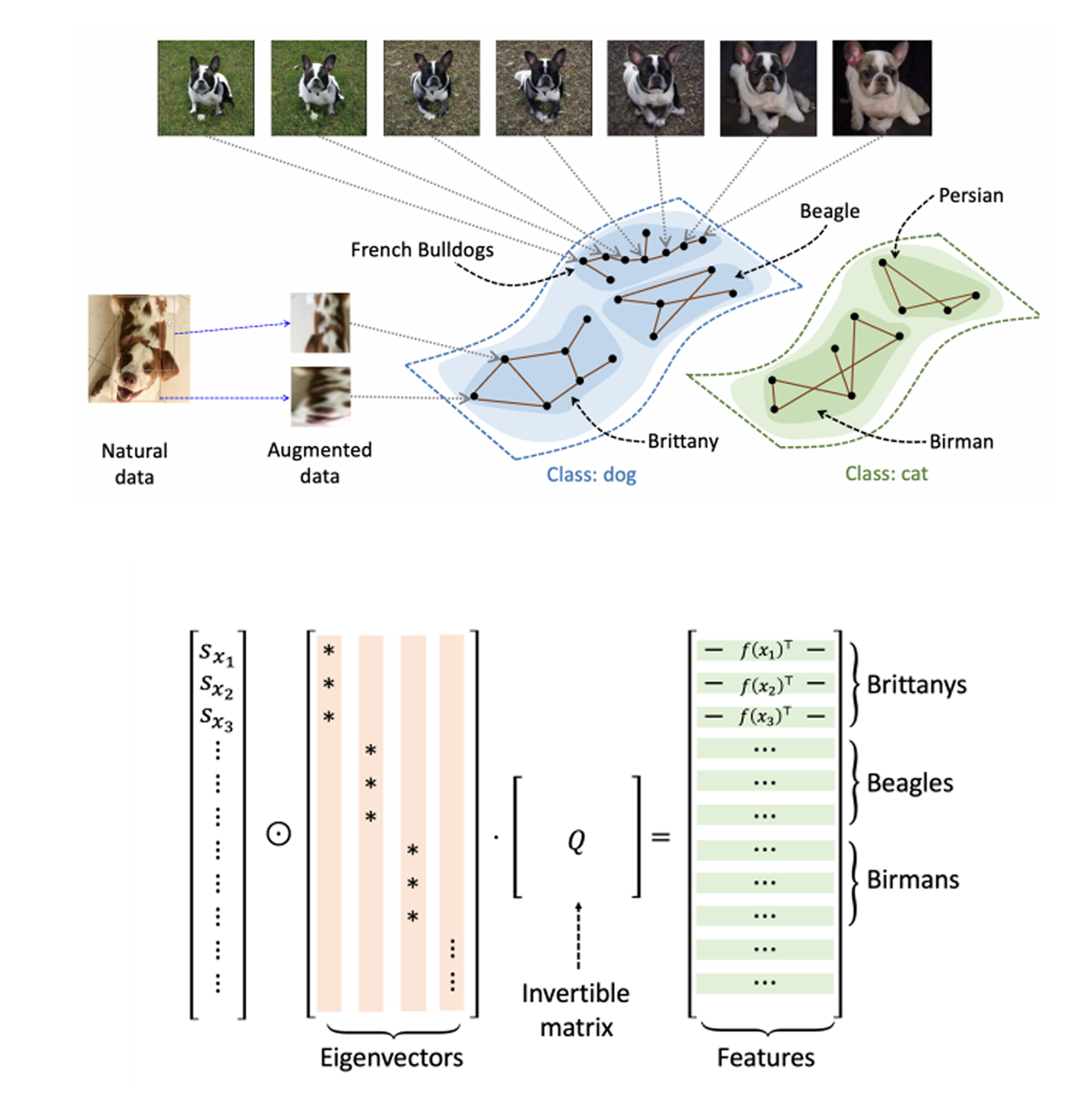
Recent works in self-supervised learning have advanced the state-of-the-art by relying on the contrastive learning paradigm, which learns representations by pushing positive pairs, or similar examples from the same class, closer together while keeping negative pairs far apart. Despite the empirical successes, theoretical foundations are limited – prior analyses assume conditional independence of the positive pairs given the same class label, but recent empirical applications use heavily correlated positive pairs (i.e., data augmentations of the same image). Our work analyzes contrastive learning without assuming conditional independence of positive pairs using a novel concept of the augmentation graph on data. Edges in this graph connect augmentations of the same datapoint, and ground-truth classes naturally form connected sub-graphs. We propose a loss that performs spectral decomposition on the population augmentation graph and can be succinctly written as a contrastive learning objective on neural net representations. Minimizing this objective leads to features with provable accuracy guarantees under linear probe evaluation. By standard generalization bounds, these accuracy guarantees also hold when minimizing the training contrastive loss. Empirically, the features learned by our objective can match or outperform several strong baselines on benchmark vision datasets. In all, this work provides the first provable analysis for contrastive learning where guarantees for linear probe evaluation can apply to realistic empirical settings. READ MORE
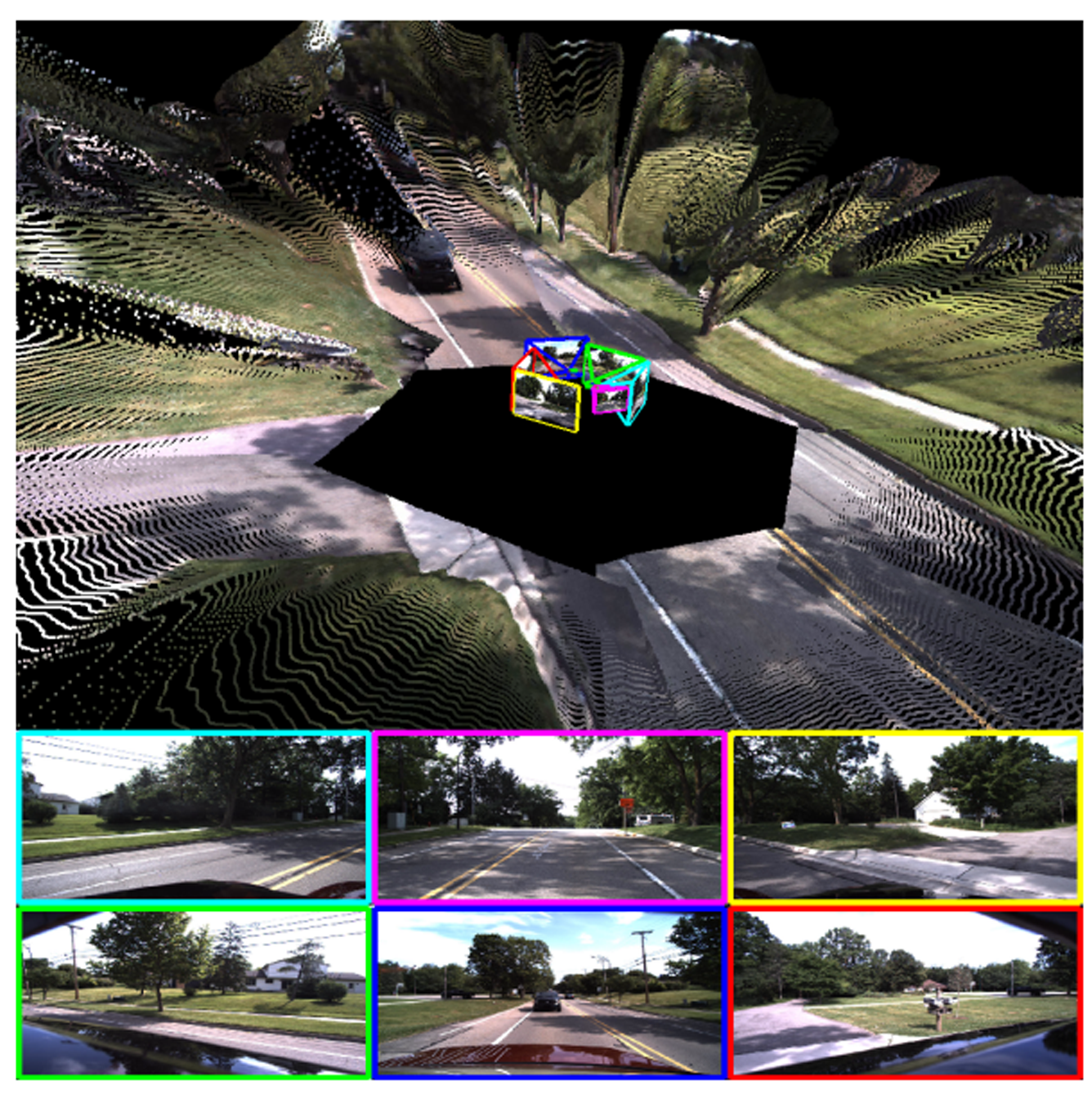
Self-supervised monocular depth and ego-motion estimation is a promising approach to replace or supplement expensive depth sensors such as LiDAR for robotics applications like autonomous driving. However, most research in this area focuses on a single monocular camera or stereo pairs that cover only a fraction of the scene around the vehicle. In this work, we extend monocular self-supervised depth and ego-motion estimation to large-baseline multi-camera rigs. Using generalized spatio-temporal contexts, pose consistency constraints, and carefully designed photometric loss masking, we learn a single network generating dense, consistent, and scale-aware point clouds that cover the same full surround 360 degree field of view as a typical LiDAR scanner. We also propose a new scale-consistent evaluation metric more suitable to multi-camera settings. Experiments on two challenging benchmarks illustrate the benefits of our approach over strong baselines. READ MORE
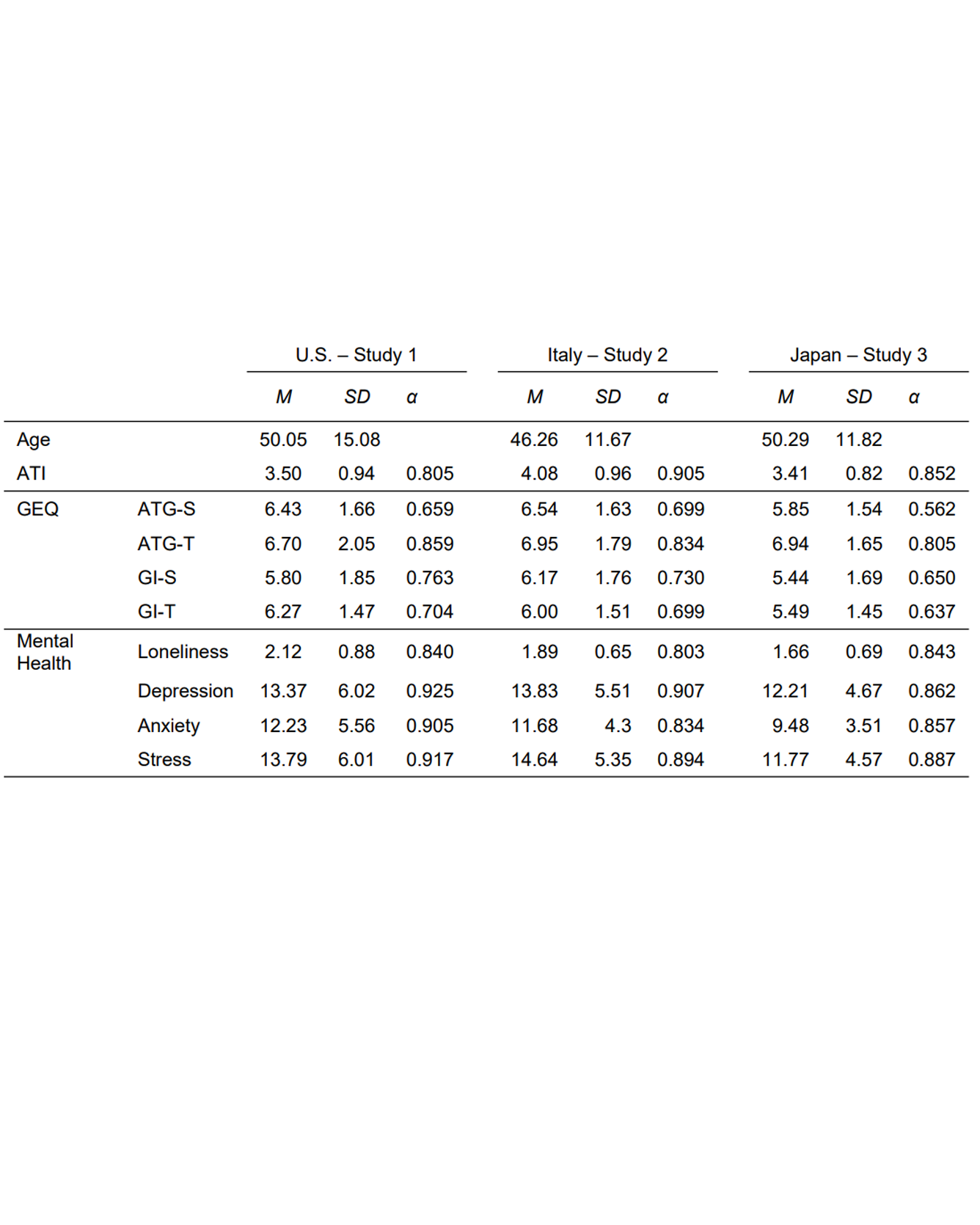
Group cohesion and social contact with other people is critical for supporting mental health (defined here as reduced loneliness, depression, anxiety, stress). Sometimes it is difficult to interact with social groups in person because of distance, poor health, or a global pandemic. In such cases, people can maintain social contact through technology like instant messaging, audio calls, and video calls. Age plays a major role in mental health and technology use: Age typically correlates with worse mental health and poor technology use, which could doubly harm older adults when most of their social connection can only be made through technology. However, some studies have shown that older adults can be quite capable of using technology and use it differently than younger adults. In this study, we sought a deeper understanding of the relationship between participants’ age and their use of and affinity for technology on group cohesion and mental health during social isolation. To do so, we surveyed participants in the United States (U.S.; Study 1, N = 202), Italy (Study 2, N = 325), and Japan (Study 3, N = 261) during a time of increased social isolation due to quarantine restrictions for the COVID-19 pandemic. Results indicated that greater affinity for technology related to worse group cohesion and mental health for younger adults , but better group cohesion and mental health for older adults . Certain subtypes of group cohesion (group integration for social purposes; GI-S) related to better mental health for younger adults and others (group integration for task purposes; GI-T) related to better mental health for older adults. Effects of age in group cohesion replicated across countries, although which specific mental health measures showed effects depended on country. Future studies of technology use and needs should differentiate populations based on age, technology use, and affinity for technology to provide further insights into how technology can best support group cohesion and mental health. Read More