Featured Publications

All Publications
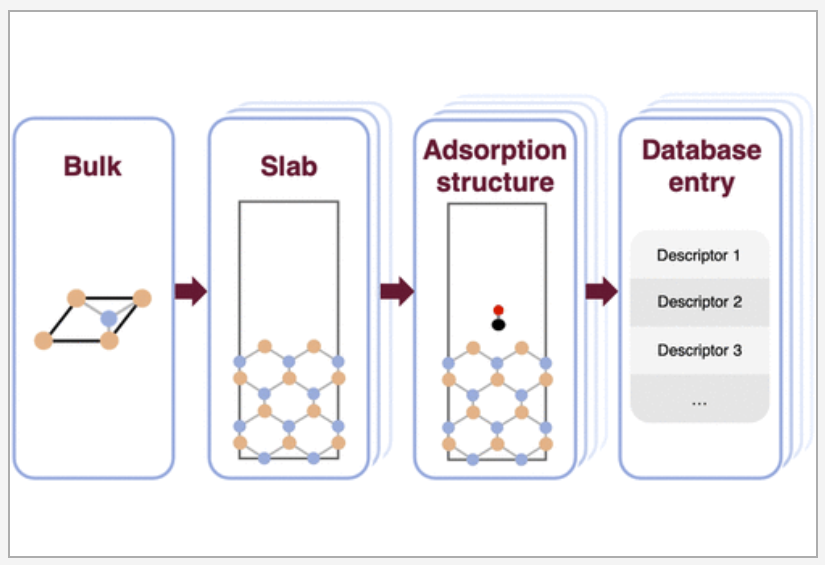
Surface adsorption is a crucial step in numerous processes, including heterogeneous catalysis, where the adsorption of key species is often used as a descriptor of efficiency. We present here an automated adsorption workflow for semiconductors which employs density functional theory calculations to generate adsorption data in a high-throughput manner. Starting from a bulk structure, the workflow performs an exhaustive surface search, followed by an adsorption structure construction step, which generates a minimal energy landscape to determine the optimal adsorbate–surface distance. An extensive set of energy-based, charge-based, geometric, and electronic descriptors tailored toward catalysis research are computed and saved to a personal user database. The application of the workflow to zinc telluride, a promising CO2 reduction photocatalyst, is presented as a case study to illustrate the capabilities of this method and its potential as a material discovery tool. READ MORE
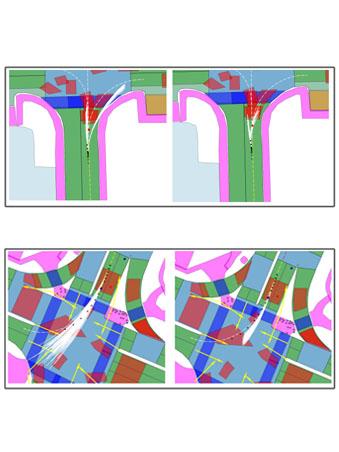
Predicting driver intentions is a difficult and crucial task for advanced driver assistance systems. Traditional confidence measures on predictions often ignore the way predicted trajectories affect downstream decisions for safe driving. In this letter, we propose a novel multi-task intent recognition neural network that predicts not only probabilistic driver trajectories, but also utility statistics associated with the predictions for a given downstream task. We establish a decision criterion for parallel autonomy that takes into account the role of driver trajectory prediction in real-time decision making by reasoning about estimated task-specific utility statistics. We further improve the robustness of our system by considering uncertainties in downstream planning tasks that may lead to unsafe decisions. We test our online system on a realistic urban driving dataset, and demonstrate its advantage in terms of recall and fall-out metrics compared to baseline methods, and demonstrate its effectiveness in intervention and warning use cases. READ MORE

The rational solid-state synthesis of inorganic compounds is formulated as catalytic nucleation on crystalline reactants, where contributions of reaction and interfacial energies to the nucleation barriers are approximated from high-throughput thermochemical data and structural and interfacial features of crystals, respectively. Favorable synthesis reactions are then identified by a Pareto analysis of relative nucleation barriers and phase selectivities of reactions leading to the target. We demonstrate the application of this approach in reaction planning for the solid-state synthesis of a range of compounds, including the widely studied oxides LiCoO2, BaTiO3, and YBa2Cu3O7, as well as other metal oxide, oxyfluoride, phosphate, and nitride targets. Pathways for enabling the retrosynthesis of inorganics are also discussed. READ MORE
Nonprecious hydrogen evolution reaction (HER) catalysts commonly suffer from severe dissolution under open-circuit potential (OCP). In this work, using calculated Pourbaix diagrams, we quantitatively analyze the stability of a set of well-known active HER catalysts (MoS2, MoP, CoP, Pt in acid, and Ni3Mo in base) under working conditions. We determine that the large thermodynamic driving force toward decomposition created by the electrode/electrolyte interface potential is responsible for the substantial dissolution of nonprecious HER catalysts at OCP. Our analysis further shows the stability of HER catalysts in acidic solution is ordered as Pt ≈ MoS2 > MoP > CoP, which is confirmed by the measured dissolution rates using an inductively coupled plasma mass spectrometer. On the basis of the gained insights, we suggest strategies to circumvent the catalyst dissolution in aqueous solution. READ MORE
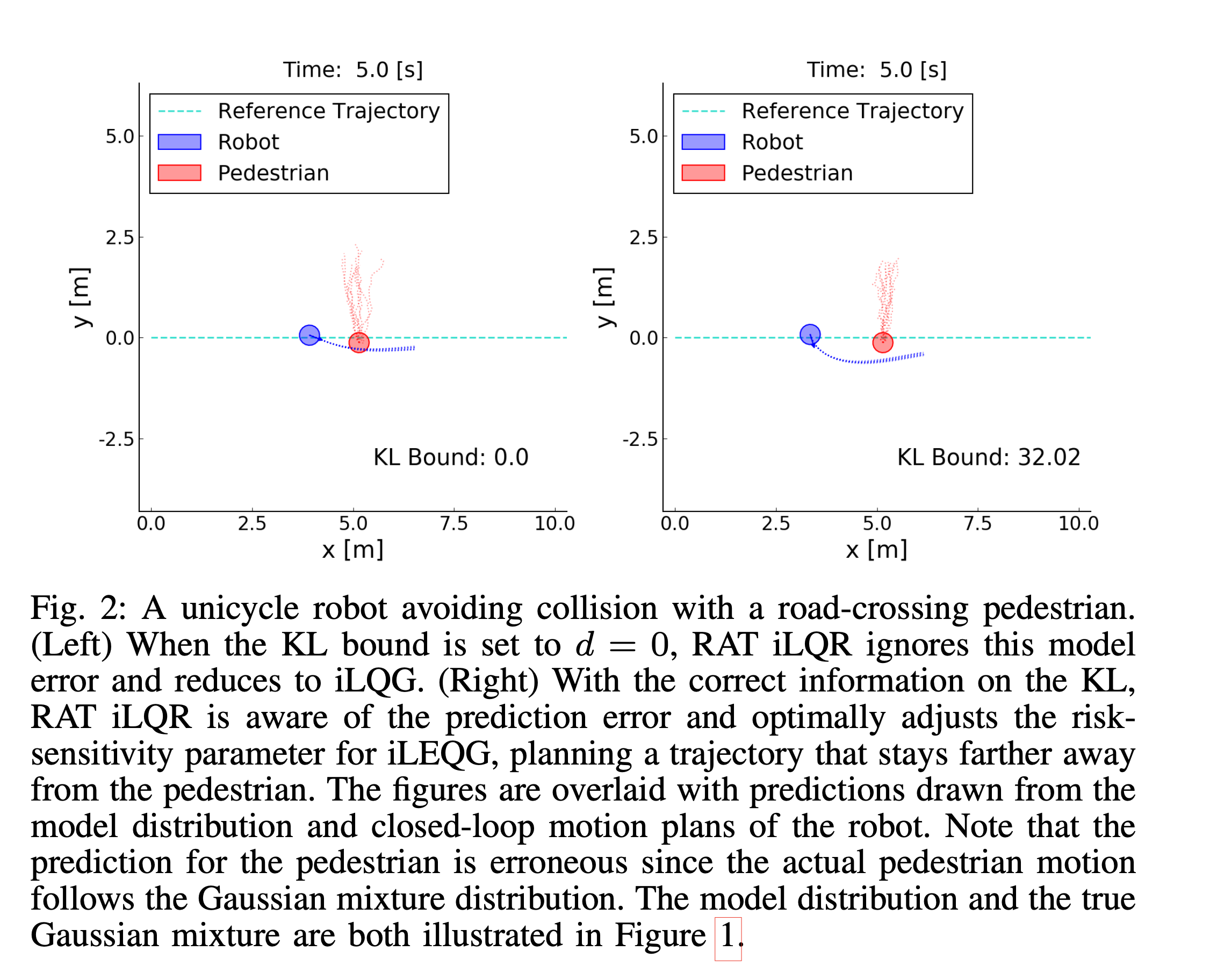
Successful robotic operation in stochastic environ- ments relies on accurate characterization of the underlying probability distributions, yet this is often imperfect due to limited knowledge. This work presents a control algorithm that is capable of handling such distributional mismatches. Specifically, we propose a novel nonlinear MPC for distributionally robust control, which plans locally optimal feedback policies against a worst-case distribution within a given KL divergence bound from a Gaussian distribution. Leveraging mathematical equivalence between distributionally robust control and risk-sensitive optimal control, our framework also provides an algorithm to dynam- ically adjust the risk-sensitivity level online for risk-sensitive control. The benefits of the distributional robustness as well as the automatic risk-sensitivity adjustment are demonstrated in a dynamic collision avoidance scenario where the predictive distribution of human motion is erroneous. READ MORE

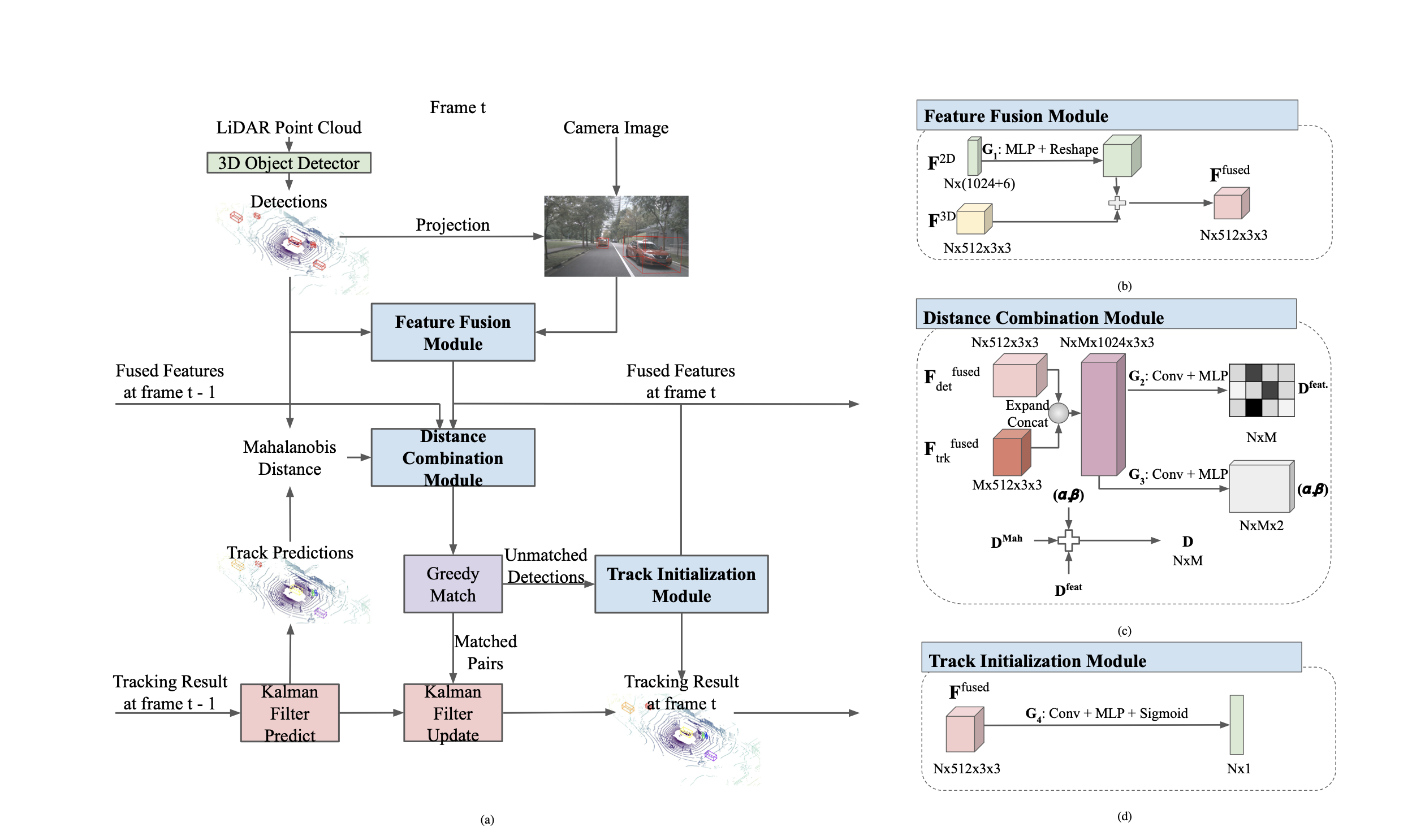
Multi-object tracking is an important ability for an autonomous vehicle to safely navigate a traffic scene. Cur- rent state-of-the-art follows the tracking-by-detection paradigm where existing tracks are associated with detected objects through some distance metric. The key challenges to increase tracking accuracy lie in data association and track life cycle management. We propose a probabilistic, multi-modal, multi- object tracking system consisting of different trainable modules to provide robust and data-driven tracking results. First, we learn how to fuse features from 2D images and 3D LiDAR point clouds to capture the appearance and geometric information of an object. Second, we propose to learn a metric that combines the Mahalanobis and feature distances when comparing a track and a new detection in data association. And third, we propose to learn when to initialize a track from an unmatched object detection. Through extensive quantitative and qualitative results, we show that our method outperforms current state- of-the-art on the NuScenes Tracking dataset. READ MORE

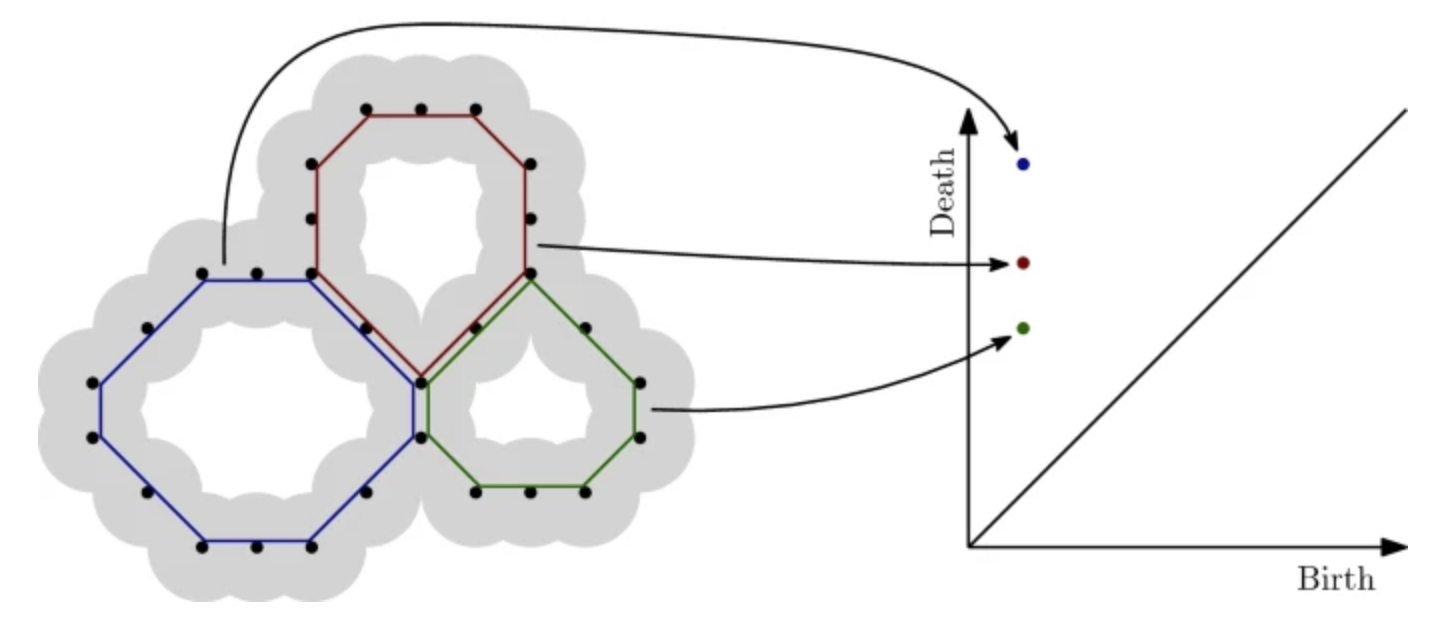
Machine learning has emerged as a powerful approach in materials discovery. Its major challenge is selecting features that create interpretable representations of materials, useful across multiple prediction tasks. We introduce an end-to-end machine learning model that automatically generates descriptors that capture a complex representation of a material’s structure and chemistry. This approach builds on computational topology techniques (namely, persistent homology) and word embeddings from natural language processing. It automatically encapsulates geometric and chemical information directly from the material system. We demonstrate our approach on multiple nanoporous metal–organic framework datasets by predicting methane and carbon dioxide adsorption across different conditions. Our results show considerable improvement in both accuracy and transferability across targets compared to models constructed from the commonly-used, manually-curated features, consistently achieving an average 25–30% decrease in root-mean-squared-deviation and an average increase of 40–50% in R2 scores. A key advantage of our approach is interpretability: Our model identifies the pores that correlate best to adsorption at different pressures, which contributes to understanding atomic-level structure–property relationships for materials design. READ MORE
In this work, we propose a novel approach for integrating rules into traffic agent trajectory prediction. Consideration of rules is important for understanding how people behave — yet, it cannot be assumed that rules are always followed. To address this challenge, we evaluate different approaches of integrating rules as inductive biases into deep learning-based prediction models. We propose a framework based on generative adversarial networks that uses tools from formal methods, namely signal temporal logic and syntax trees. This allows us to leverage information on rule obedience as features in neural networks and improves prediction accuracy without biasing towards lawful behavior. We evaluate our method on a real-world driving dataset and show improvement in performance over off-the-shelf predictors. READ MORE
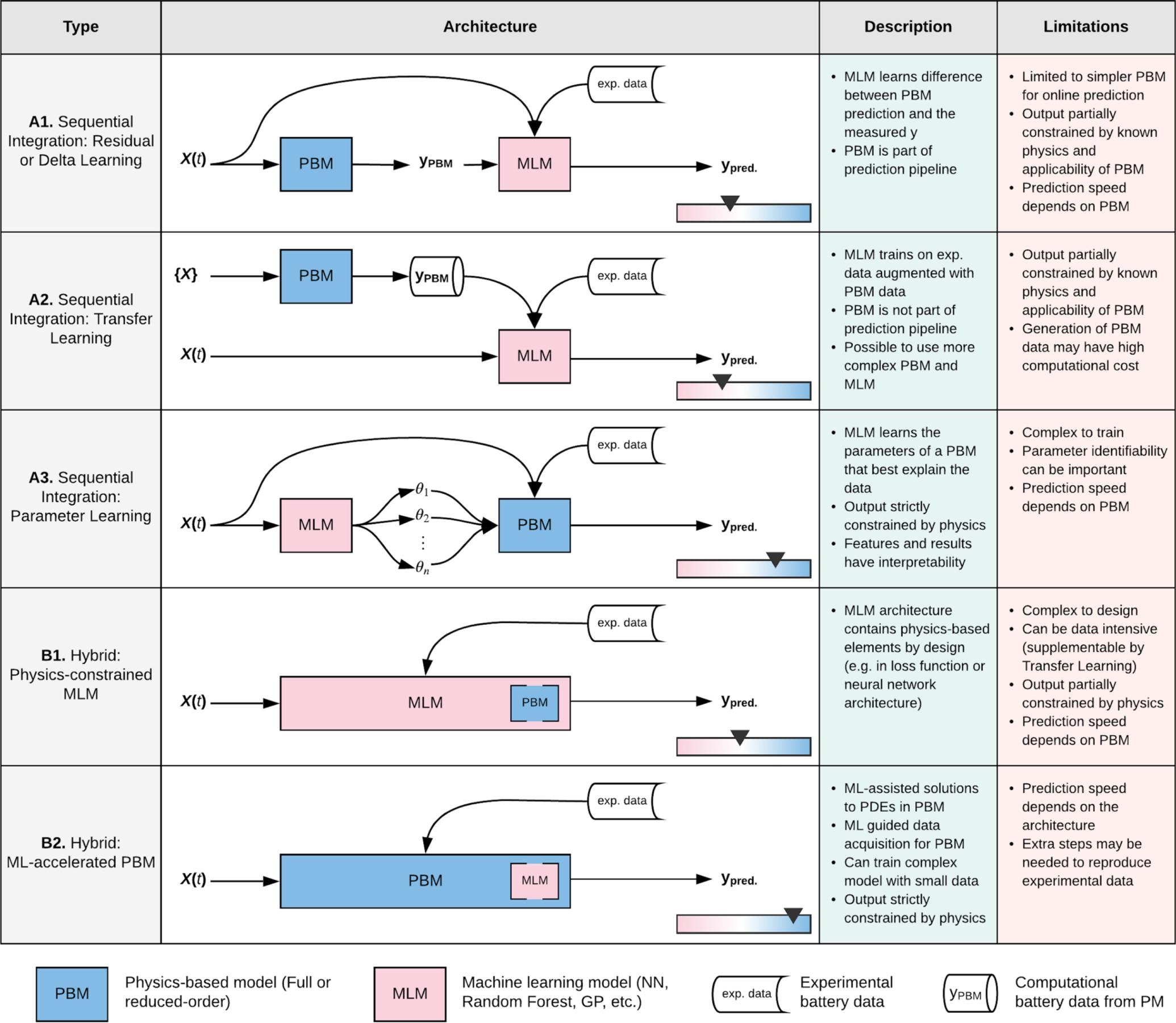
Forecasting the health of a battery is a modeling effort that is critical to driving improvements in and adoption of electric vehicles. Purely physics-based models and purely data-driven models have advantages and limitations of their own. Considering the nature of battery data and end-user applications, we outline several architectures for integrating physics-based and machine learning models that can improve our ability to forecast battery lifetime. We discuss the ease of implementation, advantages, limitations, and viability of each architecture, given the state of the art in the battery and machine learning fields. READ MORE
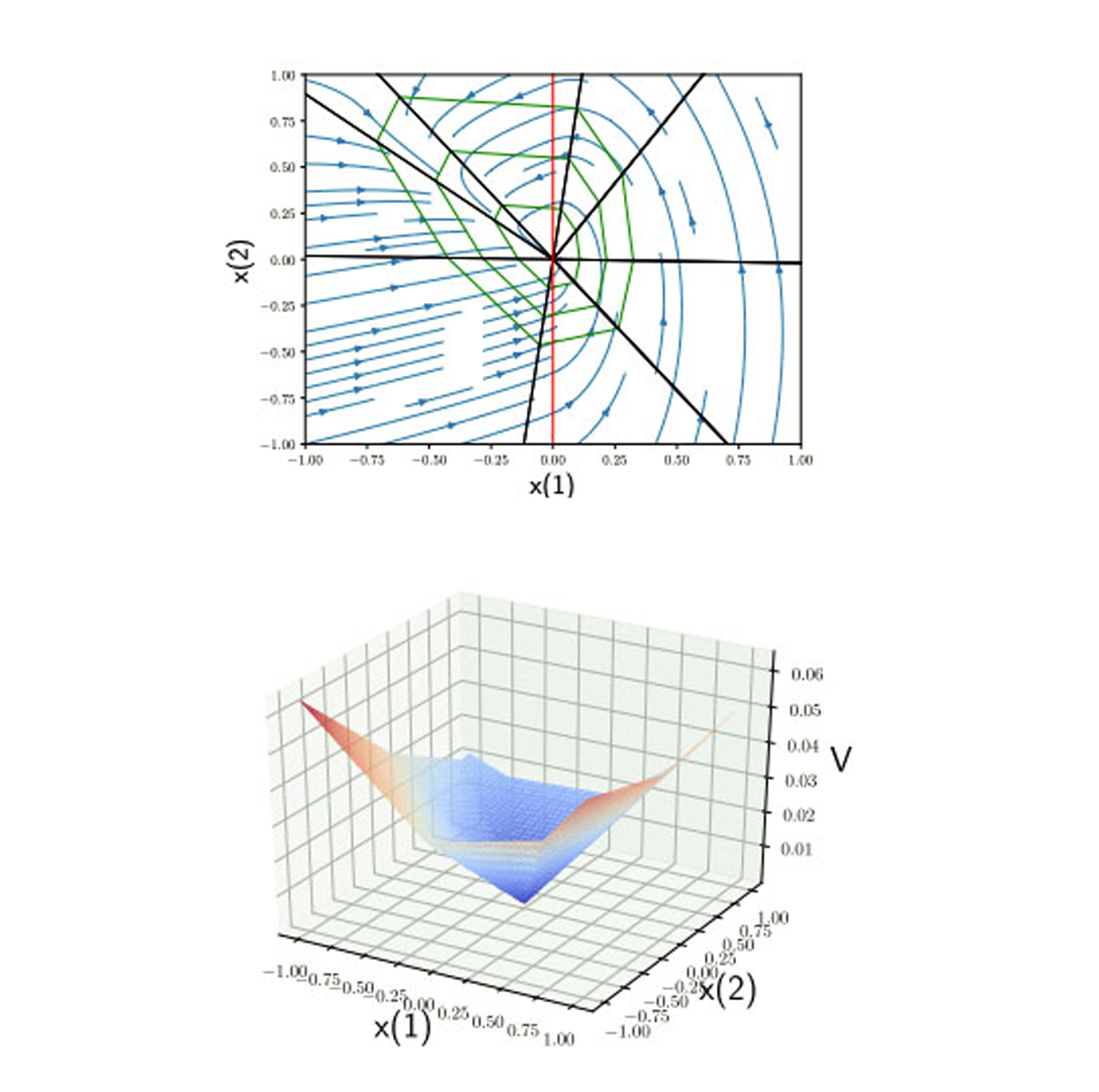
We introduce an algorithm for synthesizing and verifying piecewise linear Lyapunov functions to prove global exponential stability of piecewise linear dynamical systems. The Lyapunov functions we synthesize are parameterized by feedforward neural networks with leaky ReLU activation units. To train these neural networks, we design a loss function that measures the maximal violation of the Lyapunov conditions in the state space. We show that this maximal violation can be computed by solving a mixed-integer linear program (MILP). Compared to previous learning-based approaches, our learning approach is able to certify with high precision that the learned neural network satisfies the Lyapunov conditions not only for sampled states, but over the entire state space. Moreover, compared to previous optimization-based approaches that require a pre-specified partition of the state space when synthesizing piecewise Lyapunov functions, our method can automatically search for both the partition and the Lyapunov function simultaneously. We demonstrate our algorithm on both continuous and discrete-time systems, including some for which known strategies for partitioning of the Lyapunov function would require introducing higher order Lyapunov functions.