Featured Publications
All Publications
TRI Authors: Brian Rohr, Joseph Montoya, Santosh Suram, Linda Hung
All Authors: Steven Torrisi, Matthew Carbone, Brian Rohr, Joseph Montoya, Yang Ha, Junko Yano, Santosh Suram, Linda Hung
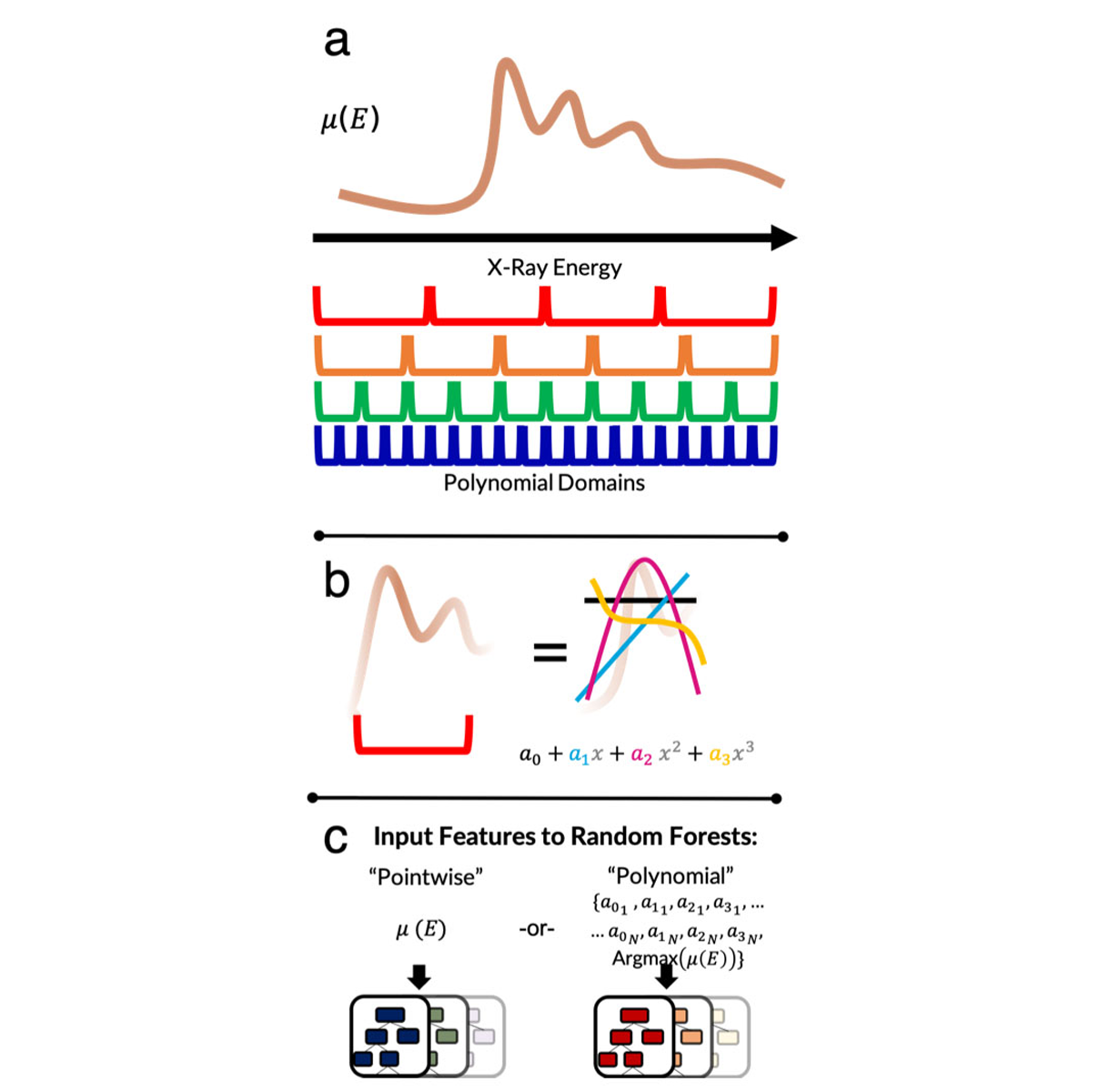
X-ray absorption spectroscopy (XAS) produces a wealth of information about the local structure of materials, but interpretation of spectra often relies on easily accessible trends and prior assumptions about the structure. Recently, researchers have demonstrated that machine learning models can automate this process to predict the coordinating environments of absorbing atoms from their XAS spectra. However, machine learning models are often difficult to interpret, making it challenging to determine when they are valid and whether they are consistent with physical theories. In this work, we present three main advances to the data-driven analysis of XAS spectra: we demonstrate the efficacy of random forests in solving two new property determination tasks (predicting Bader charge and mean nearest neighbor distance), we show that multiscale featurization can elucidate the regions and trends in spectra that encode various local properties, and we address the effect of normalization on model interpretability. The multiscale featurization transforms the spectrum into a vector of polynomial-fit features, and is contrasted with the commonly-used "pointwise" featurization that directly uses the entire spectrum as input. We find that across thousands of transition metal oxide spectra, the relative importance of features describing the curvature of the spectrum can be localized to individual energy ranges, and we can separate the importance of constant, linear, quadratic, and cubic trends, as well as the white line energy. This work has the potential to assist rigorous theoretical interpretations, expedite experimental data collection, and automate analysis of XAS spectra, thus accelerating discovery of new functional materials. Read More
Citation: Torrisi, Steven, Matthew Carbone, Brian Rohr, Joseph H. Montoya, Yang Ha, Junko Yano, Santosh Suram, and Linda Hung. "Random Forest Machine Learning Models for Interpretable X-Ray Absorption Near-Edge Structure Spectrum-Property Relationships." chemRxiv preprint (2020). doi:10.26434/chemrxiv.11873691.v1
TRI Authors: Muratahan Aykol, Santosh K. Suram* All Authors: Brian Rohr, Helge S. Stein, Dan Guevarra, Yu Wang, Joel A. Haber, Muratahan Aykol, Santosh K. Suram* and John M. Gregoire*
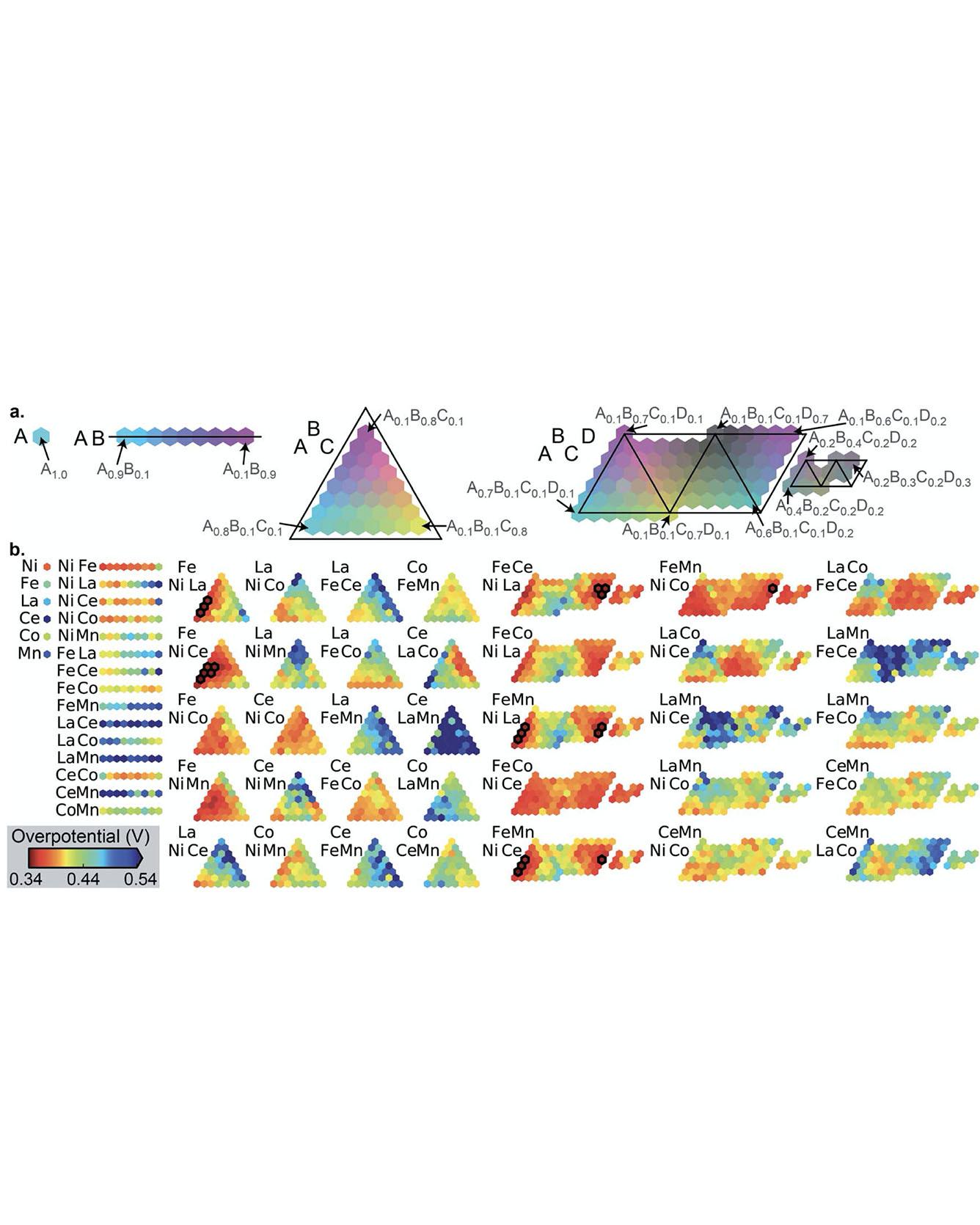
Sequential learning (SL) strategies, i.e. iteratively updating a machine learning model to guide experiments, have been proposed to significantly accelerate materials discovery and research. Applications on computational datasets and a handful of optimization experiments have demonstrated the promise of SL, motivating a quantitative evaluation of its ability to accelerate materials discovery, specifically in the case of physical experiments. The benchmarking effort in the present work quantifies the performance of SL algorithms with respect to a breadth of research goals: discovery of any “good” material, discovery of all “good” materials, and discovery of a model that accurately predicts the performance of new materials. To benchmark the effectiveness of different machine learning models against these goals, we use datasets in which the performance of all materials in the search space is known from high-throughput synthesis and electrochemistry experiments. Each dataset contains all pseudo-quaternary metal oxide combinations from a set of six elements (chemical space), the performance metric chosen is the electrocatalytic activity (overpotential) for the oxygen evolution reaction (OER). A diverse set of SL schemes is tested on four chemical spaces, each containing 2121 catalysts. The presented work suggests that research can be accelerated by up to a factor of 20 compared to random acquisition in specific scenarios. The results also show that certain choices of SL models are ill-suited for a given research goal resulting in substantial deceleration compared to random acquisition methods. The results provide quantitative guidance on how to tune an SL strategy for a given research goal and demonstrate the need for a new generation of materials-aware SL algorithms to further accelerate materials discovery. Read More Citation: Rohr, Brian, Helge S. Stein, Dan Guevarra, Yu Wang, Joel A. Haber, Muratahan Aykol, Santosh K. Suram, and John M. Gregoire. "Benchmarking the acceleration of materials discovery by sequential learning." Chemical Science 11, no. 10 (2020): 2696-2706.
TRI Authors: Alejandro Castro, Ante Qu (intern), Naveen Kuppuswamy, Alex Alspach, Michael Sherman
All Authors: Alejandro Castro, Ante Qu, Naveen Kuppuswamy, Alex Alspach, Michael Sherman
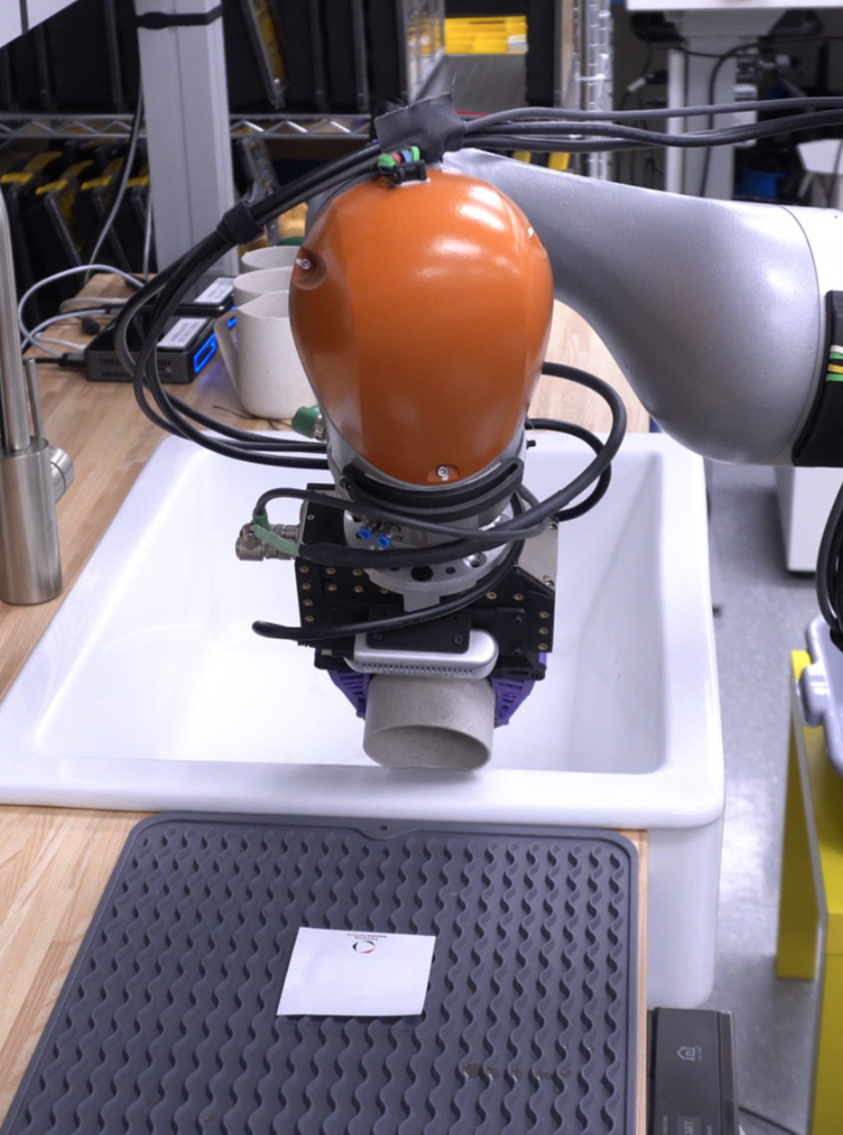
Multibody simulation with frictional contact has been a challenging subject of research for the past thirty years. Rigidbody assumptions are commonly used to approximate the physics of contact, and together with Coulomb friction, lead to challengingto-solve nonlinear complementarity problems (NCP). On the other hand, robot grippers often introduce significant compliance. Compliant contact, combined with regularized friction, can be modeled entirely with ODEs, avoiding NCP solves. Unfortunately, regularized friction introduces high-frequency stiff dynamics and even implicit methods struggle with these systems, especially during slip-stick transitions. To improve the performance of implicit integration for these systems we introduce a Transition-Aware Line Search (TALS), which greatly improves the convergence of the Newton-Raphson iterations performed by implicit integrators. We find that TALS works best with semi-implicit integration, but that the explicit treatment of normal compliance can be problematic. To address this, we develop a Transition-Aware Modified SemiImplicit (TAMSI) integrator that has similar computational cost to semi-implicit methods but implicitly couples compliant contact forces, leading to a more robust method. We evaluate the robustness, accuracy and performance of TAMSI and demonstrate our approach alongside relevant sim-to-real manipulation tasks. Read More
Citation: Castro, Alejandro M., Ante Qu, Naveen Kuppuswamy, Alex Alspach, and Michael Sherman. "A Transition-Aware Method for the Simulation of Compliant Contact with Regularized Friction." IEEE Robotics and Automation Letters 5, no. 2 (2020): 1859-1866.
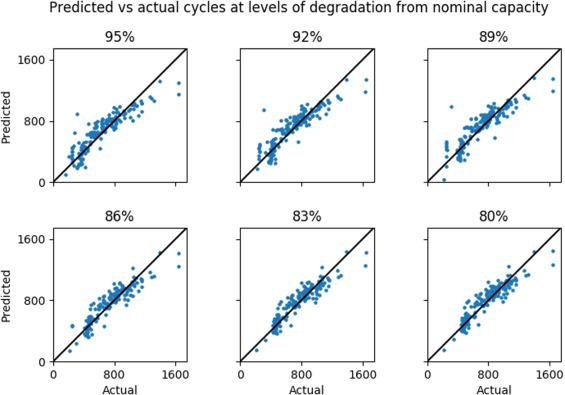
Battery evaluation and early prediction software package (BEEP) provides an open-source Python-based framework for the management and processing of high-throughput battery cycling data-streams. BEEPs features include file-system based organization of raw cycling data and metadata received from cell testing equipment, validation protocols that ensure the integrity of such data, parsing and structuring of data into Python-objects ready for analytics, featurization of structured cycling data to serve as input for machine-learning, and end-to-end examples that use processed data for anomaly detection and featurized data to train early-prediction models for cycle life. BEEP is developed in response to the software and expertise gap between cell-level battery testing and data-driven battery development. READ MORE
TRI Authors: Adrien Gaidon, Nikos Arechiga
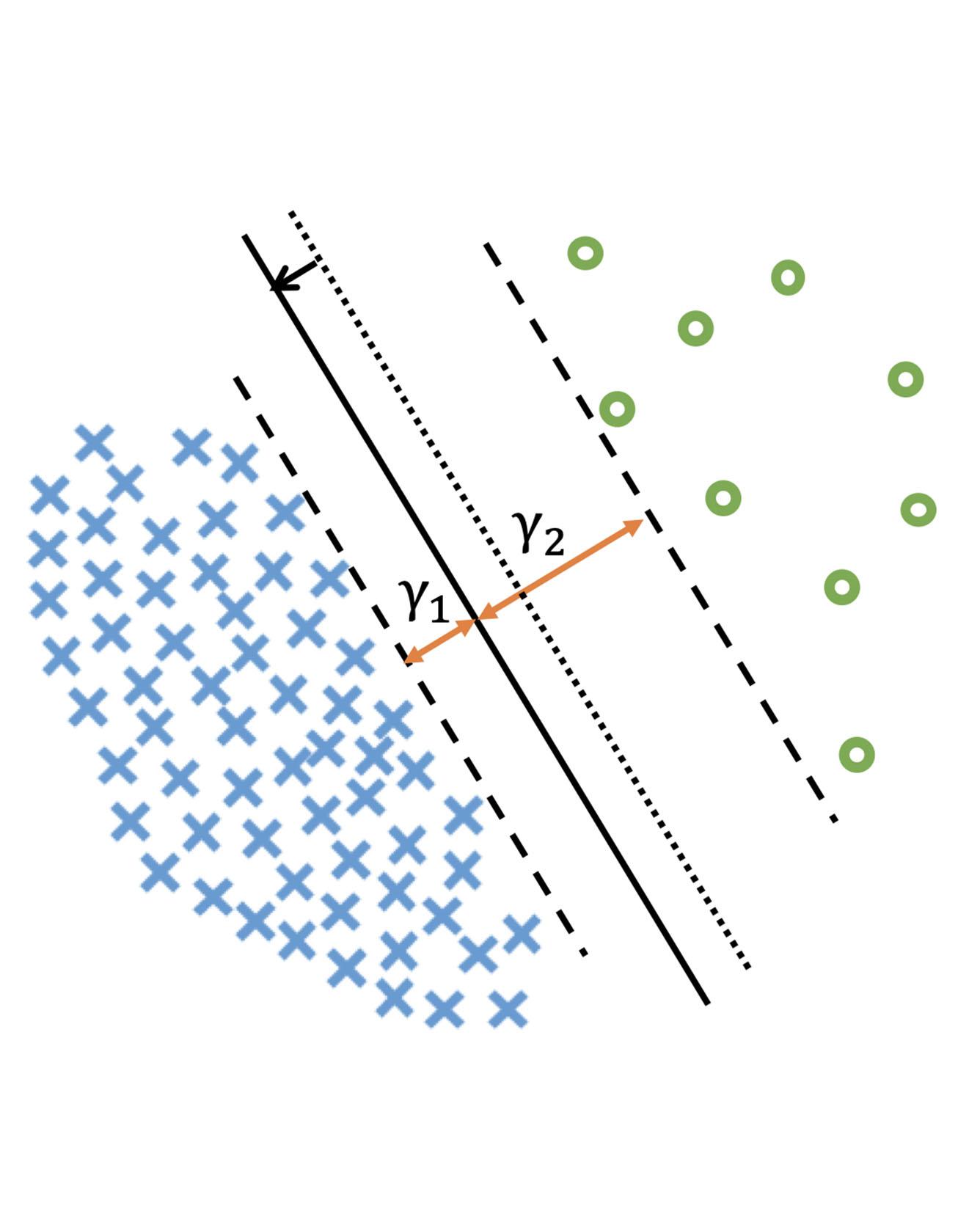
All Authors: Kaidi Cao, Colin Wei, Adrien Gaidon, Nikos Arechiga, Tengyu Ma
Deep learning algorithms can fare poorly when the training dataset suffers from heavy class-imbalance but the testing criterion requires good generalization on less frequent classes. We design two novel methods to improve performance in such scenarios. First, we propose a theoretically-principled label-distribution-aware margin (LDAM) loss motivated by minimizing a margin-based generalization bound. This loss replaces the standard cross-entropy objective during training and can be applied with prior strategies for training with class-imbalance such as re-weighting or re-sampling. Second, we propose a simple, yet effective, training schedule that defers re-weighting until after the initial stage, allowing the model to learn an initial representation while avoiding some of the complications associated with re-weighting or re-sampling. We test our methods on several benchmark vision tasks including the real-world imbalanced dataset iNaturalist 2018. Our experiments show that either of these methods alone can already improve over existing techniques and their combination achieves even better performance gains. Read More
Citation: Cao, Kaidi, Colin Wei, Adrien Gaidon, Nikos Arechiga, and Tengyu Ma. "Learning imbalanced datasets with label-distribution-aware margin loss." In Advances in Neural Information Processing Systems, pp. 1565-1576. 2019.
TRI Authors: Stephen McGill, Jonathan DeCastro, Luke Fletcher, John Leonard, Guy Rosman
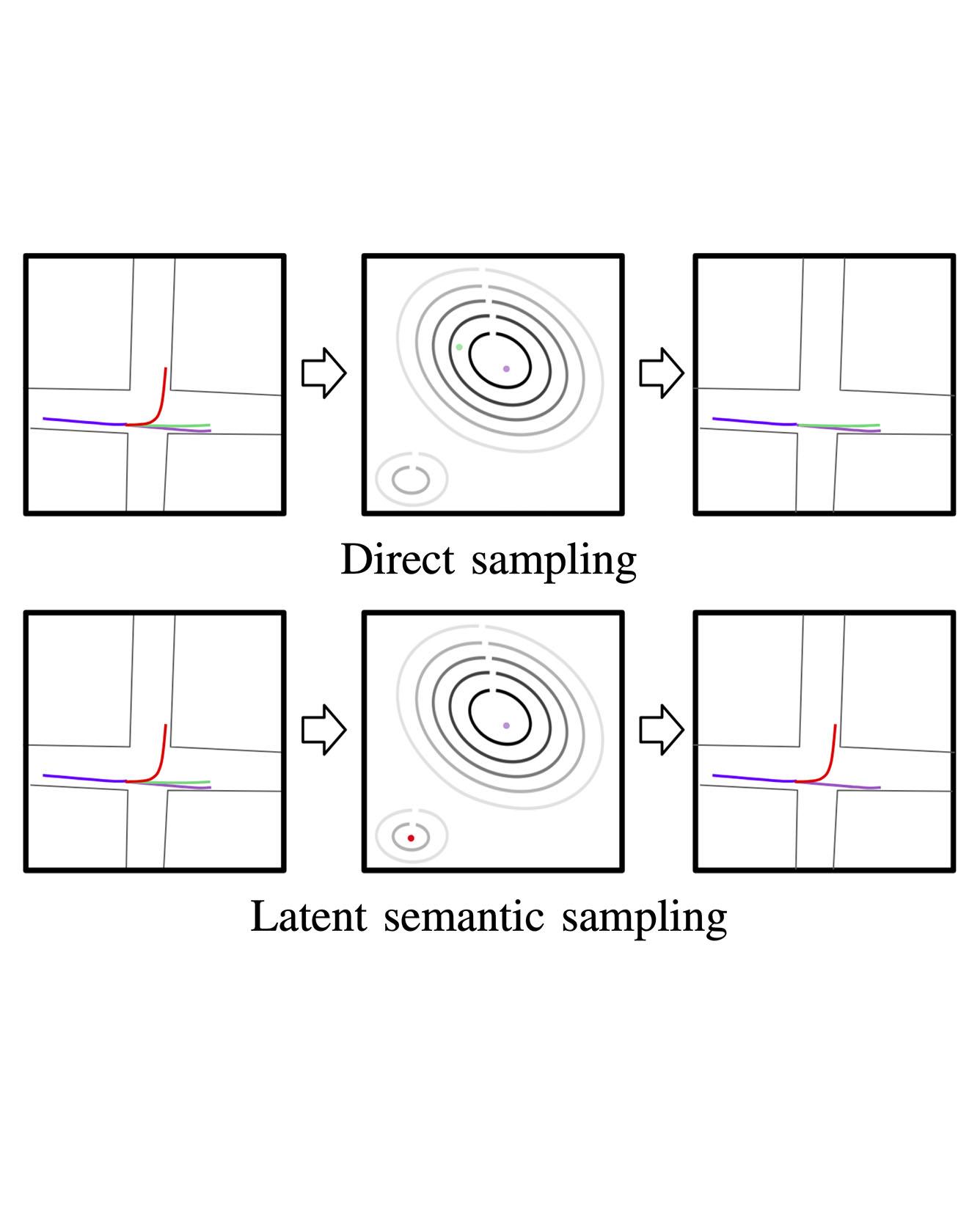
All Authors: Huang, Xin, Stephen McGill, Jonathan DeCastro, Luke Fletcher, John Leonard, Brian Williams, Guy Rosman
Vehicle trajectory prediction is crucial for autonomous driving and advanced driver assistant systems. While existing approaches may sample from a predicted distribution of vehicle trajectories, they lack the ability to explore it -- a key ability for evaluating safety from a planning and verification perspective. In this work, we devise a novel approach for generating realistic and diverse vehicle trajectories. We extend the generative adversarial network (GAN) framework with a low-dimensional approximate semantic space, and shape that space to capture semantics such as merging and turning. We sample from this space in a way that mimics the predicted distribution, but allows us to control coverage of semantically distinct outcomes. We validate our approach on a publicly available dataset and show results that achieve state-of-the-art prediction performance, while providing improved coverage of the space of predicted trajectory semantics. Read More
Citation: Huang, Xin, Stephen McGill, Jonathan DeCastro, Luke Fletcher, John Leonard, Brian Williams, Guy Rosman. "DiversityGAN: Diversity-Aware Vehicle Motion Prediction via Latent Semantic Sampling." Robotics and Automation Letters, with oral presentation to appear in IROS 2020.
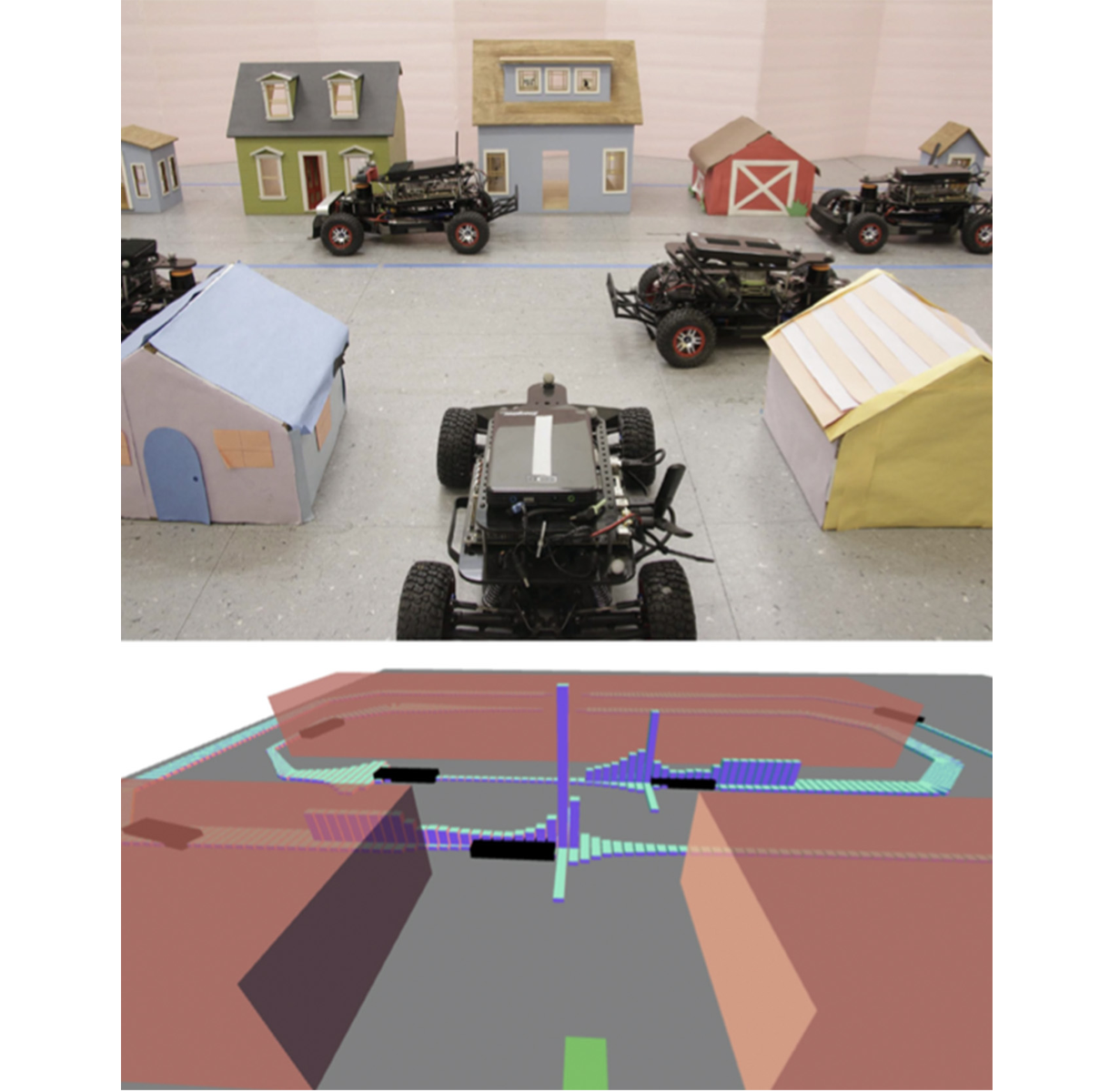
TRI Authors: Stephen G. McGill, Guy Rosman, Luke Fletcher, John J. Leonard
All Authors: Stephen G. McGill, Guy Rosman, Teddy Ort, Alyssa Pierson, Igor Gilischenski, Brandon Araki, Luke Fletcher, Sertac Karaman, Daniela Rus, John J. Leonard
Among traffic accidents in the USA, 23% of fatal and 32% of non-fatal incidents occurred at intersections. For driver assistance systems, intersection navigation remains a difficult problem that is critically important to increasing driver safety. In this letter, we examine how to navigate an unsignalized intersection safely under occlusions and faulty perception. We propose a realtime, probabilistic, risk assessment for parallel autonomy control applications for occluded intersection scenarios. The algorithms are implemented on real hardware and are deployed in a variety of turning and merging topologies. We show phenomena that establish go/no-go decisions, augment acceleration through an intersection and encourage nudging behaviors toward intersections. Read More
Citation: McGill, Stephen, Guy Rosman, Teddy Ort, Alyssa Pierson, Igor Gilischenski, Brandon Araki, Luke Fletcher, Sertac Karaman, Daniela Rus, John J. Leonard. "Probabilistic Safety Metrics for Navigating Occluded Intersections." in International Conference on Intelligent Robots and Systems, IROS 2019, 2019
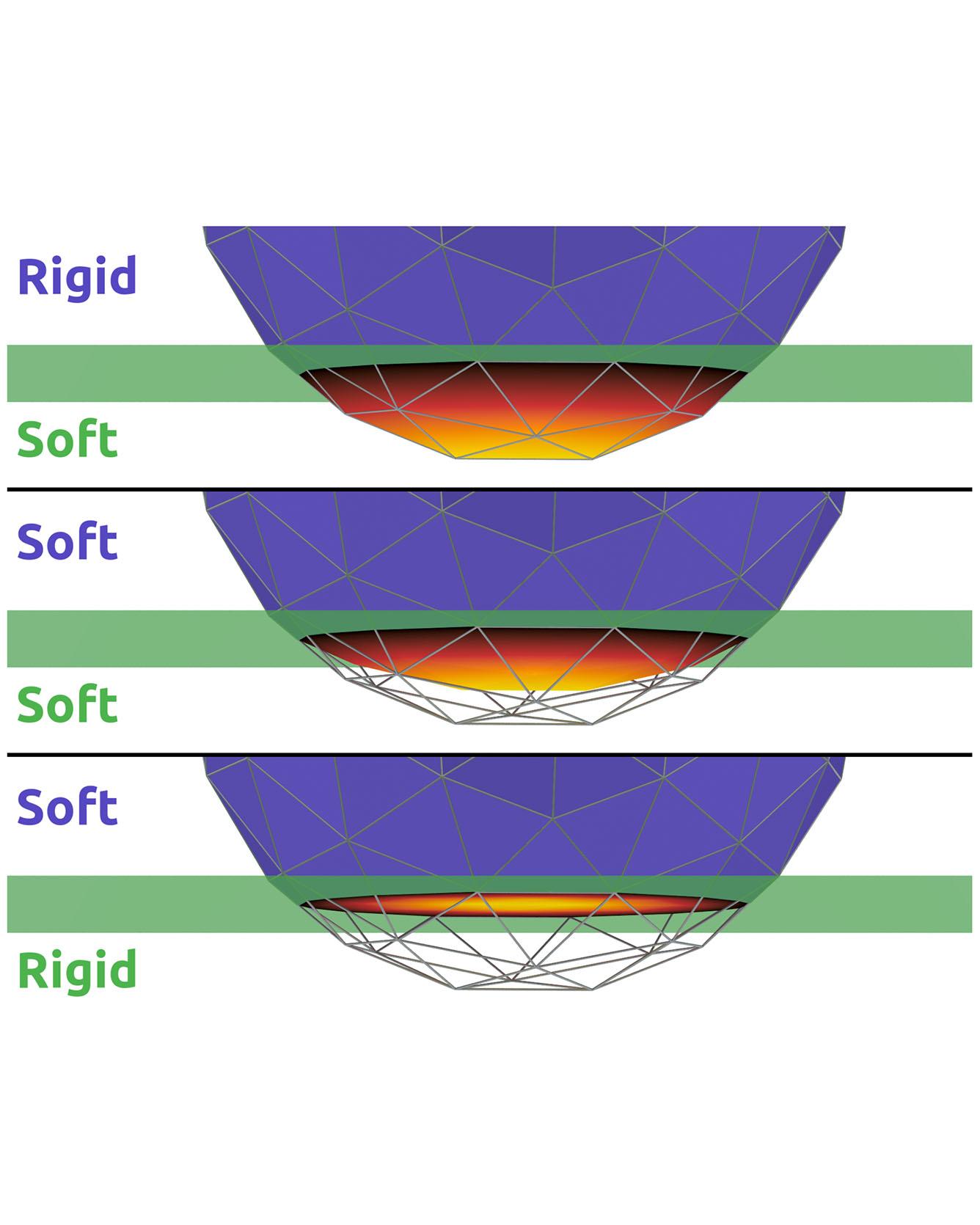
TRI Authors: Evan Drumwright, Michael Sherman All Authors: Elandt, Ryan, Evan Drumwright, Michael Sherman, and Andy Ruina We introduce an approximate model for predicting the net contact wrench between nominally rigid objects for use in simulation, control, and state estimation. The model combines and generalizes two ideas: a bed of springs (an "elastic foundation") and hydrostatic pressure. In this model, continuous pressure fields are computed offline for the interior of each nominally rigid object. Unlike hydrostatics or elastic foundations, the pressure fields need not satisfy mechanical equilibrium conditions. When two objects nominally overlap, a contact surface is defined where the two pressure fields are equal. This static pressure is supplemented with a dissipative rate-dependent pressure and friction to determine tractions on the contact surface. The contact wrench between pairs of objects is an integral of traction contributions over this surface. The model evaluates much faster than elasticity-theory models, while showing the essential trends of force, moment, and stiffness increase with contact load. It yields continuous wrenches even for non-convex objects and coarse meshes. The method shows promise as sufficiently fast, accurate, and robust for design-in-simulation of robot controllers. Read moreCitation: Elandt, Ryan, Evan Drumwright, Michael Sherman, and Andy Ruina. "A pressure field model for fast, robust approximation of net contact force and moment between nominally rigid objects." IROS 2019 arXiv preprint arXiv:1904.11433 (2019).
TRI Author: Hongkai Dai
All Authors: Bernardo Aceituno-Cabezas, Hongkai Dai, Alberto Rodriguez
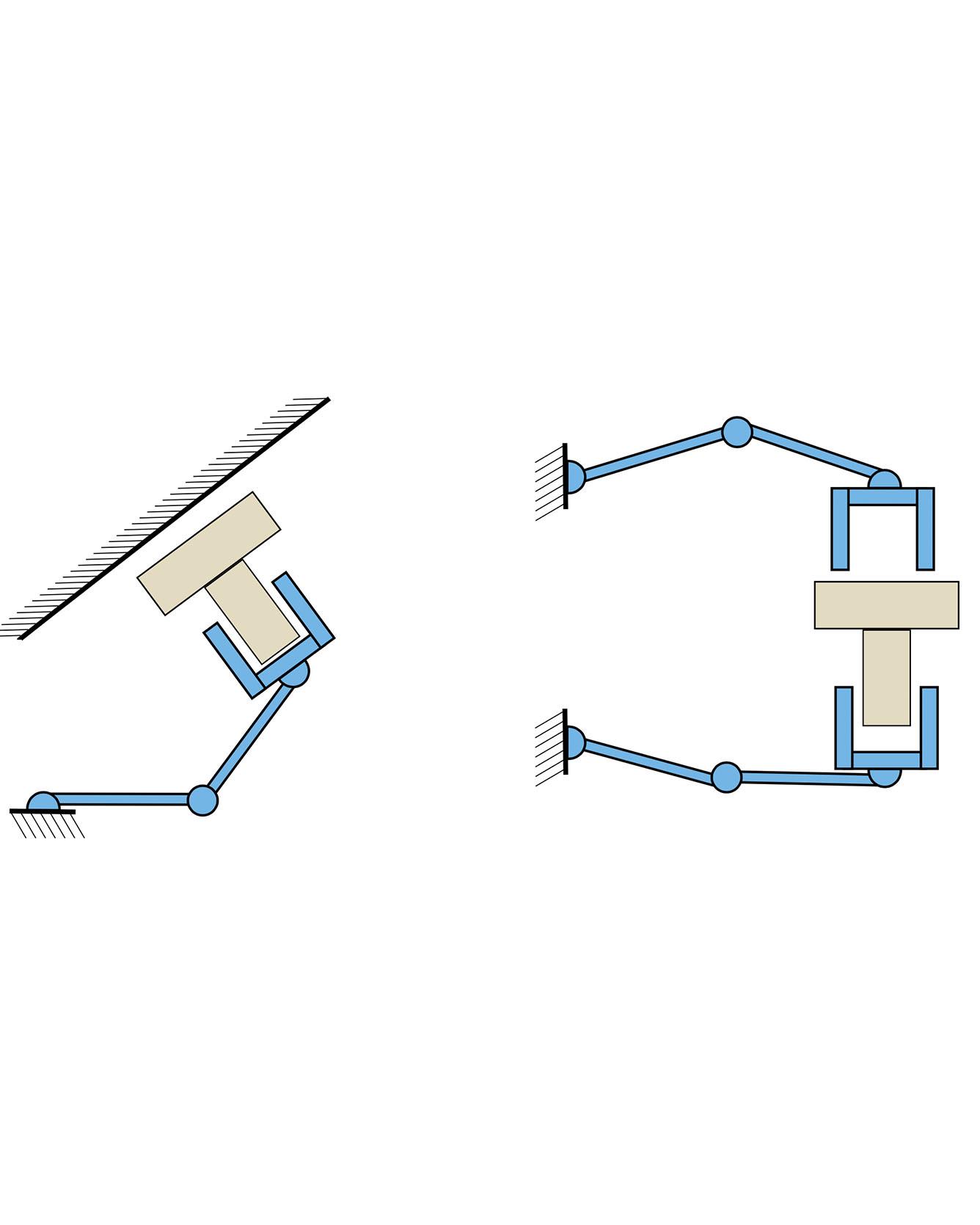
Caging is a promising tool which allows a robot to manipulate an object without directly reasoning about the contact dynamics involved. Furthermore, caging also provides useful guarantees in terms of robustness to uncertainty, and often serves as a way-point to a grasp. Unfortunately, previous work on caging is often based on computational geometry or discrete topology tools, causing restriction on gripper geometry, and difficulty on integration into larger manipulation frameworks. In this paper, we develop a convex-combinatorial model to characterize caging from an optimization perspective. More specifically, we study the configuration space of the object, where the fingers act as obstacles that enclose the configuration of the object. The convex-combinatorial nature of this approach provides guarantees on optimality, convergence and scalability, and its optimization nature makes it adaptable for further applications on robot manipulation tasks. Read More
Citation: Aceituno-Cabezas, Bernardo, Hongkai Dai, and Alberto Rodriguez. "A Convex-Combinatorial Model for Planar Caging." arXiv preprint arXiv:1809.06427 (2018).
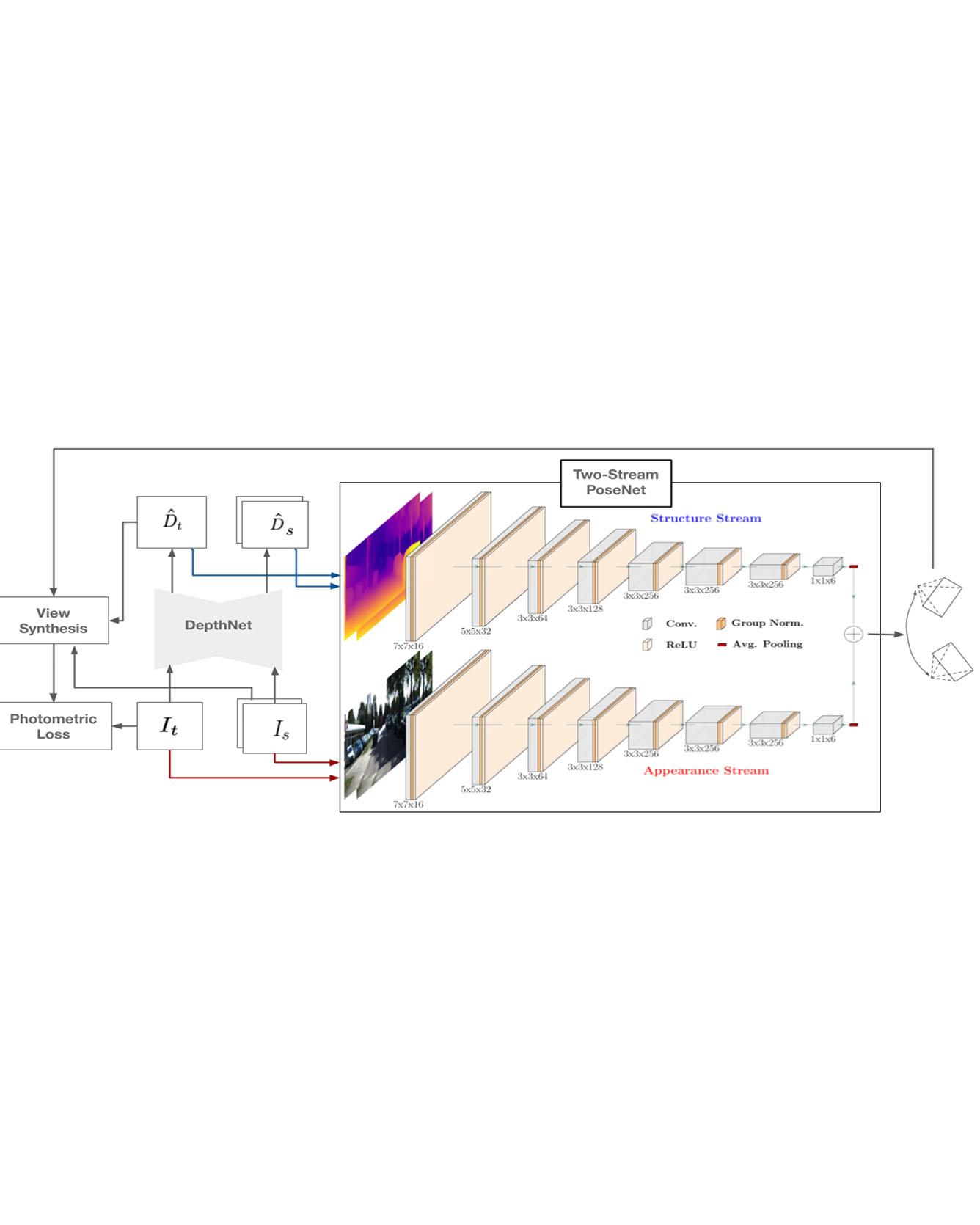
TRI Authors: Rares Ambrus, Vitor Guizilini, Jie Li, Sudeep Pillai, Adrien Gaidon
All Authors: Rares Ambrus, Vitor Guizilini, Jie Li, Sudeep Pillai, Adrien Gaidon
Learning depth and camera ego-motion from raw unlabeled RGB video streams is seeing exciting progress through self-supervision from strong geometric cues. To leverage not only appearance but also scene geometry, we propose a novel self-supervised two-stream network using RGB and inferred depth information for accurate visual odometry. In addition, we introduce a sparsity-inducing data augmentation policy for ego-motion learning that effectively regularizes the pose network to enable stronger generalization performance. As a result, we show that our proposed two-stream pose network achieves state-of-the-art results among learning-based methods on the KITTI odometry benchmark, and is especially suited for self-supervision at scale. Our experiments on a large-scale urban driving dataset of 1 million frames indicate that the performance of our proposed architecture does indeed scale progressively with more data. Read more
Citation: Ambrus, Rares, Vitor Guizilini, Jie Li, Sudeep Pillai, and Adrien Gaidon. "Two stream networks for self-supervised ego-motion estimation." In Conference on Robot Learning (CoRL) 2019.