Featured Publications
All Publications
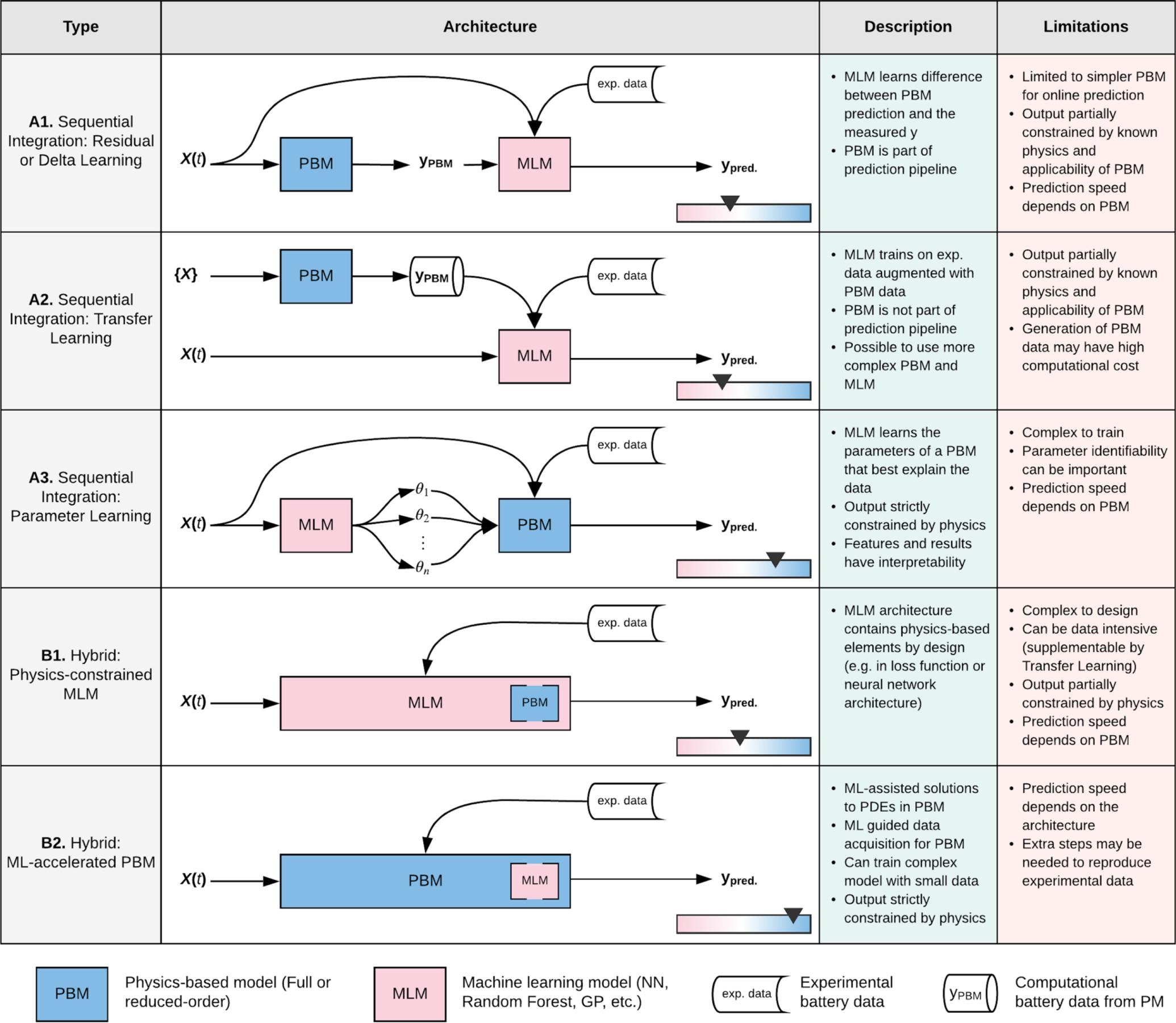
Forecasting the health of a battery is a modeling effort that is critical to driving improvements in and adoption of electric vehicles. Purely physics-based models and purely data-driven models have advantages and limitations of their own. Considering the nature of battery data and end-user applications, we outline several architectures for integrating physics-based and machine learning models that can improve our ability to forecast battery lifetime. We discuss the ease of implementation, advantages, limitations, and viability of each architecture, given the state of the art in the battery and machine learning fields. READ MORE
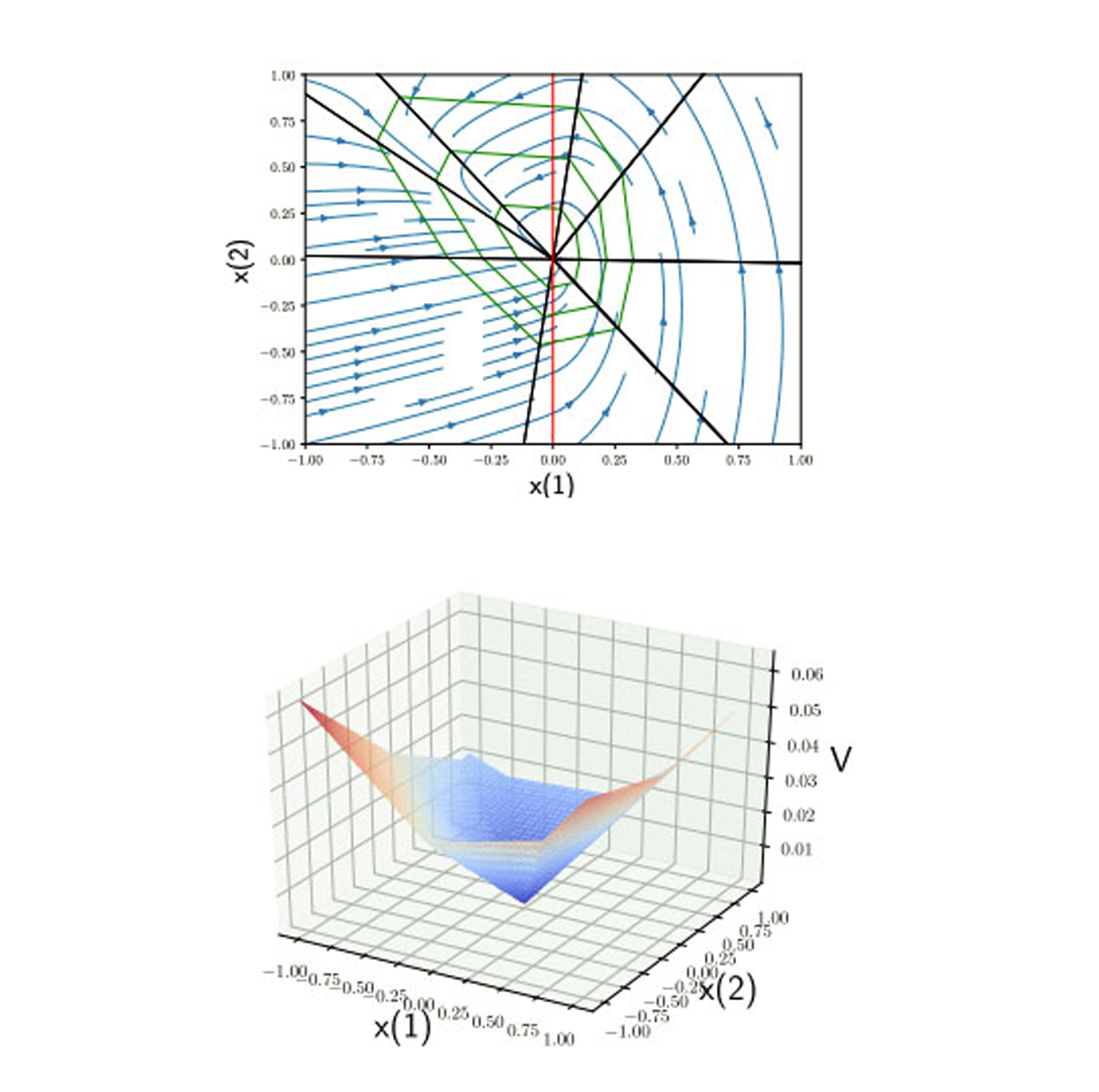
We introduce an algorithm for synthesizing and verifying piecewise linear Lyapunov functions to prove global exponential stability of piecewise linear dynamical systems. The Lyapunov functions we synthesize are parameterized by feedforward neural networks with leaky ReLU activation units. To train these neural networks, we design a loss function that measures the maximal violation of the Lyapunov conditions in the state space. We show that this maximal violation can be computed by solving a mixed-integer linear program (MILP). Compared to previous learning-based approaches, our learning approach is able to certify with high precision that the learned neural network satisfies the Lyapunov conditions not only for sampled states, but over the entire state space. Moreover, compared to previous optimization-based approaches that require a pre-specified partition of the state space when synthesizing piecewise Lyapunov functions, our method can automatically search for both the partition and the Lyapunov function simultaneously. We demonstrate our algorithm on both continuous and discrete-time systems, including some for which known strategies for partitioning of the Lyapunov function would require introducing higher order Lyapunov functions.
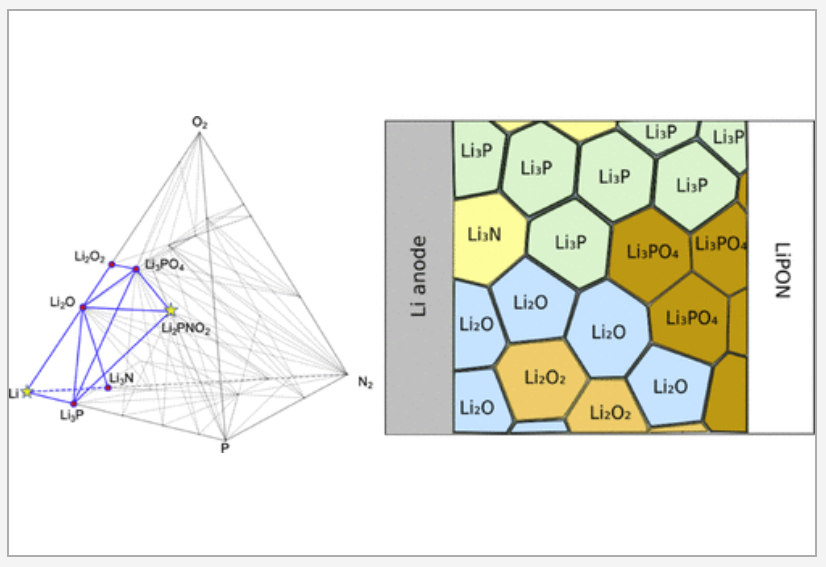
All-solid-state lithium-ion batteries have attracted significant research interest for providing high power and energy densities with enhanced operational safety. Despite the discoveries of solid electrolyte materials with superionic conductivities, it remains a challenge to maintain high rate capability in all-solid lithium-ion batteries in long-term operation. The observed rate degradation has been attributed to reactivity and resistance at the electrode–electrolyte interfaces. We examine interfaces formed between eight electrolytes including garnet, LiPON, and Li10GeP2S12 (LGPS) and seven electrode materials including an NCM cathode and a metallic Li anode and identify the most rapid lithium-ion diffusion pathways through metastable arrangements of product phases that may precipitate out at each interface. Our analysis accounts for possible density functional theory (DFT) error, metastability, and finite-temperature effects by statistically sampling thousands of possible phase diagrams for each interface. The lithium-ion conductivities in the product phases at the interface are evaluated using machine-learned interatomic potentials trained on the fly. In nearly all electrode–electrolyte interfaces we evaluate, we predict that lithium-ion conduction in the product phases making up the interphase region becomes the rate-limiting step for battery performance. READ MORE
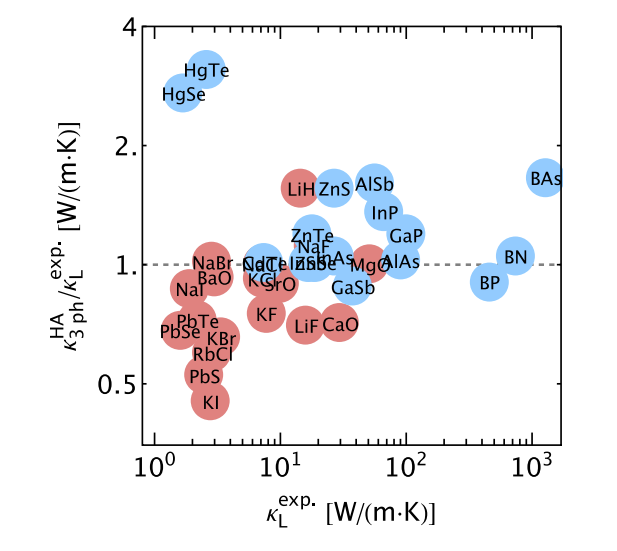
Thermal transport phenomena are ubiquitous and play a critical role in the performance of various microelectronic and energy-conversion devices. Binary rocksalt and zinc blende compounds, despite their rather simple crystal structures, exhibit an extraordinary range of lattice thermal conductivity (κL) spanning over 3 orders of magnitude. A comprehensive understanding of the underlying heat transfer mechanism through the development of microscopic theories is therefore of fundamental importance, yet it remains elusive because of the challenges arising from explicitly treating higher-order anharmonicity. Recent theoretical and experimental advances have revealed the essential role of quartic anharmonicity in suppressing heat transfer in zinc blende boron arsenide (BAs) with ultrahigh κL. However, critical questions concerning the general effects of higher-order anharmonicity in the broad classes and chemistries of binary solids are still unanswered. Using our recently developed high-throughput phonon framework based on first-principles density functional theory calculations, we systematically investigate the lattice dynamics and thermal transport properties of 37 binary compounds with rocksalt and zinc blende structures at room temperature, with a particular focus on unraveling the impacts of quartic anharmonicity on κL. Our advanced theoretical model for computing κL embraces current state-of-the-art methods, featuring a complete treatment of quartic anharmonicity for both phonon frequencies and lifetimes at finite temperatures, as well as contributions from off-diagonal terms in the heat-flux operator. We find the impacts of quartic anharmonicity on κL to be strikingly different in rocksalt and zinc blende compounds, owing to the countervailing effects on finite-temperature-induced shifts in phonon frequencies and scattering rates. By correlating κL with the phonon scattering phase space, we outline a qualitative but efficient route to assess the importance of four-phonon scattering from harmonic phonon calculations. Among notable examples, in zinc blende HgTe, we identify an unprecedented sixfold reduction in κL due to four-phonon scattering, which dominates over the three-phonon scattering in the acoustic region at room temperature. We also demonstrate a possible breakdown of the phonon gas model in rocksalt AgCl, wherein the phonon states are significantly broadened due to strong intrinsic anharmonicity, inducing off-diagonal contributions to κL comparable to the diagonal ones. The deep physical insights gained in this work can be used to guide the rational design of thermal management materials. READ MORE
TRI Authors: Kuan-Hui Lee, Matthew Kliemann, Adrien Gaidon, Jie Li, Chao Fang, Sudeep Pillai, Wolfram Burgard
All Authors: KH Lee, M. Kliemann, A. Gaidon, J. Li, C. Fang, S. Pillai, W. Burgard
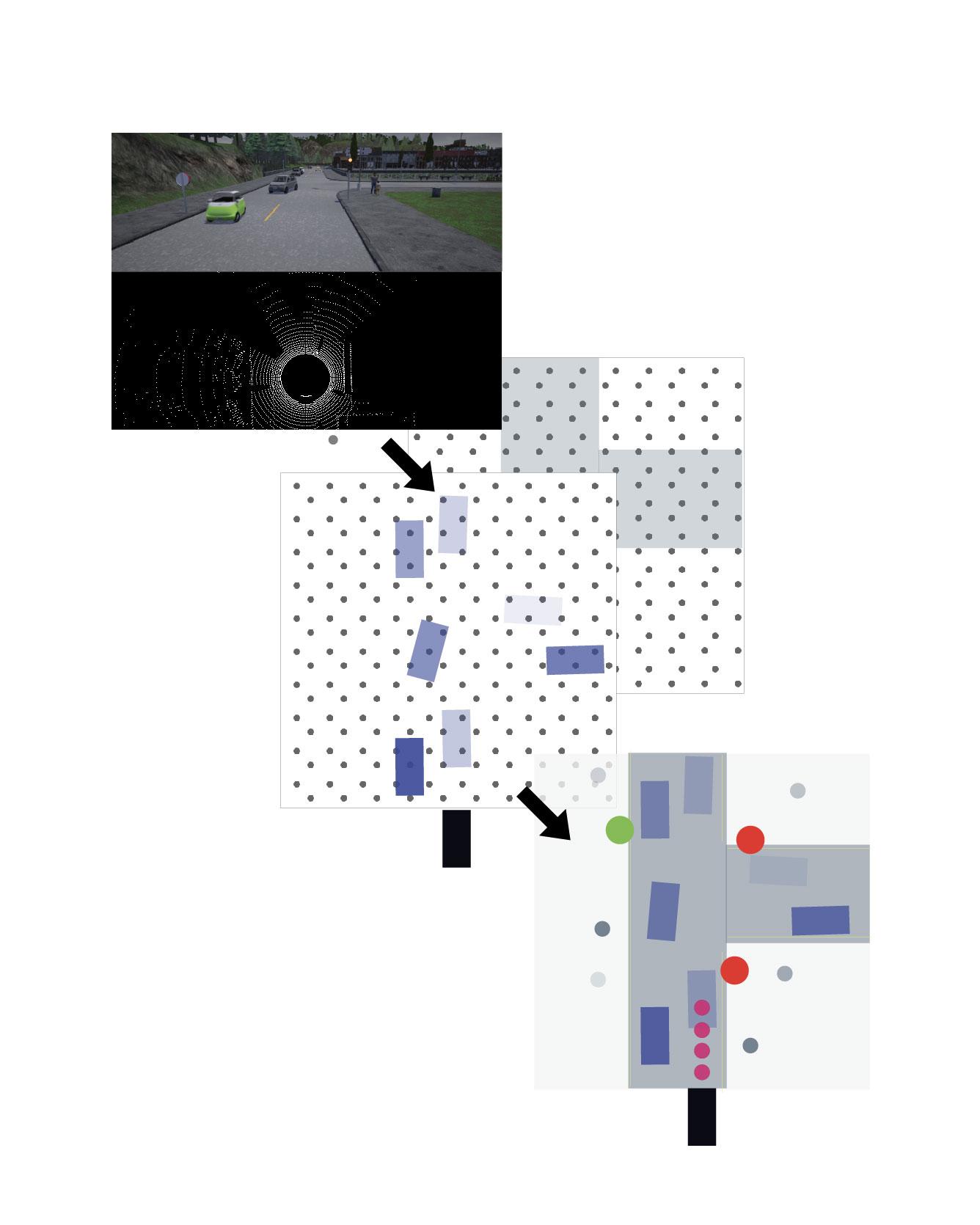
In autonomous driving, accurately estimating the state of surrounding obstacles is critical for safe and robust path planning. However, this perception task is difficult, particularly for generic obstacles/objects, due to appearance and occlusion changes. To tackle this problem, we propose an end-to-end deep learning framework for LIDAR-based flow estimation in bird's eye view (BeV). Our method takes consecutive point cloud pairs as input and produces a 2-D BeV flow grid describing the dynamic state of each cell. The experimental results show that the proposed method not only estimates 2-D BeV flow accurately but also improves tracking performance of both dynamic and static objects. Read More
Citation: Lee, Kuan-Hui, Matthew Kliemann, Adrien Gaidon, Jie Li, Chao Fang, Sudeep Pillai, and Wolfram Burgard. "PillarFlow: End-to-end Birds-eye-view Flow Estimation for Autonomous Driving." arXiv e-prints (2020) To appear in IROS, 2020

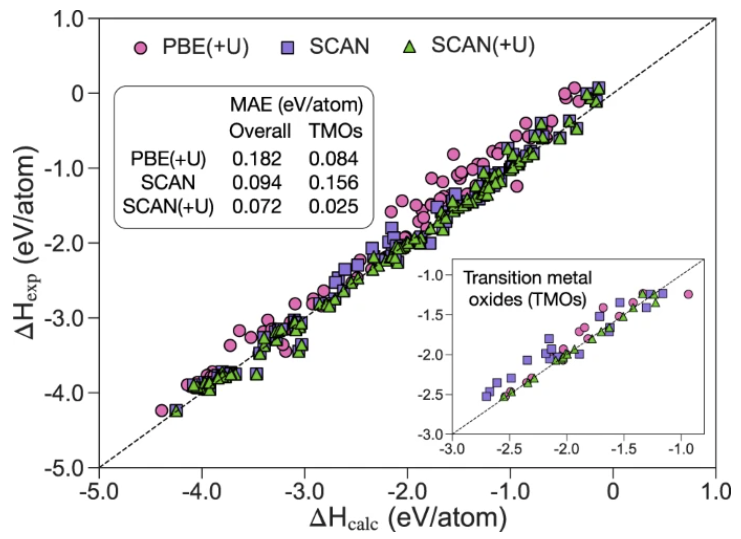
In this work, using the SCAN functional, we develop a simple method on top of the Materials Project (MP) Pourbaix diagram framework to accurately predict the aqueous stability of solids. We extensively evaluate the SCAN functional’s performance in computed formation enthalpies for a broad range of oxides and develop Hubbard U corrections for transition-metal oxides where the standard SCAN functional exhibits large deviations. The performance of the calculated Pourbaix diagram using the SCAN functional is validated with comparison to the experimental and the MP PBE Pourbaix diagrams for representative examples. Benchmarks indicate the SCAN Pourbaix diagram systematically outperforms the MP PBE in aqueous stability prediction. We further show applications of this method in accurately predicting the dissolution potentials of the state-of-the-art catalysts for oxygen evolution reaction in acidic media. READ MORE
TRI Authors: Adrien Gaidon, Rares Ambrus, Guy Rosman, Wolfram Burgard.
All Authors: Buhler, Andreas, Adrien Gaidon, Andrei Cramariuc, Rares Ambrus, Guy Rosman, Wolfram Burgard.
Safe autonomous driving requires robust detection of other traffic participants. However, robust does not mean perfect, and safe systems typically minimize missed detections at the expense of a higher false positive rate. This results in conservative and yet potentially dangerous behavior such as avoiding imaginary obstacles. In the context of behavioral cloning, perceptual errors at training time can lead to learning difficulties or wrong policies, as expert demonstrations might be inconsistent with the perceived world state. In this work, we propose a behavioral cloning approach that can safely leverage imperfect perception without being conservative. Our core contribution is a novel representation of perceptual uncertainty for learning to plan. We propose a new probabilistic birds-eye-view semantic grid to encode the noisy output of object perception systems. We then leverage expert demonstrations to learn an imitative driving policy using this probabilistic representation. Using the CARLA simulator, we show that our approach can safely overcome critical false positives that would otherwise lead to catastrophic failures or conservative behavior. Read More
Citation: Buhler, Andreas, Adrien Gaidon, Andrei Cramariuc, Rares Ambrus, Guy Rosman, Wolfram Burgard. "Driving Through Ghosts: Behavioral Cloning with False Positives." To appear in International Conference on Intelligent Robots and Systems (IROS) 2020.
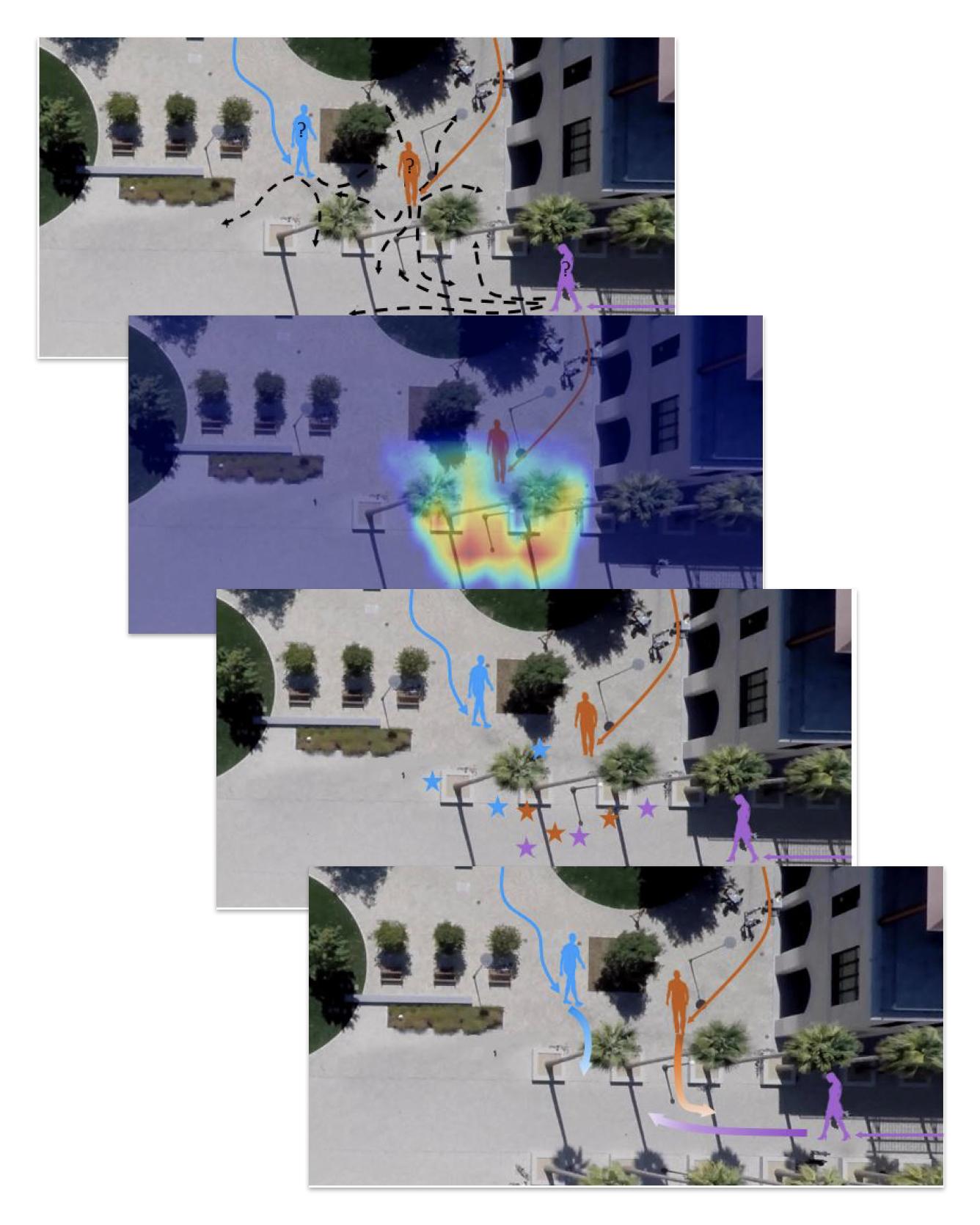
TRI Authors: Kuan-Hui Lee, Adrien Gaidon All Authors: K. Mangalam, H. Girase, S. Agarwal, K-H. Lee, E. Adeli, J. Malik, A. Gaidon
Human trajectory forecasting with multiple socially interacting agents is of critical importance for autonomous navigation in human environments, e.g., for self-driving cars and social robots. In this work, we present Predicted Endpoint Conditioned Network (PECNet) for flexible human trajectory prediction. PECNet infers distant trajectory endpoints to assist in long-range multi-modal trajectory prediction. A novel non-local social pooling layer enables PECNet to infer diverse yet socially compliant trajectories. Additionally, we present a simple "truncation-trick" for improving few-shot multi-modal trajectory prediction performance. We show that PECNet improves state-of-the-art performance on the Stanford Drone trajectory prediction benchmark by ~20.9% and on the ETH/UCY benchmark by ~40.8%. Read more
Citation: Mangalam, Karttikeya, Harshayu Girase, Shreyas Agarwal, Kuan-Hui Lee, Ehsan Adeli, Jitendra Malik, and Adrien Gaidon. "It Is Not the Journey but the Destination: Endpoint Conditioned Trajectory Prediction." ECCV, 2020 arXiv preprint arXiv:2004.02025 (2020).
TRI Authors: Nikos Arechiga
All Authors: Karen Leung, Nikos Arechiga, Marco Pavone
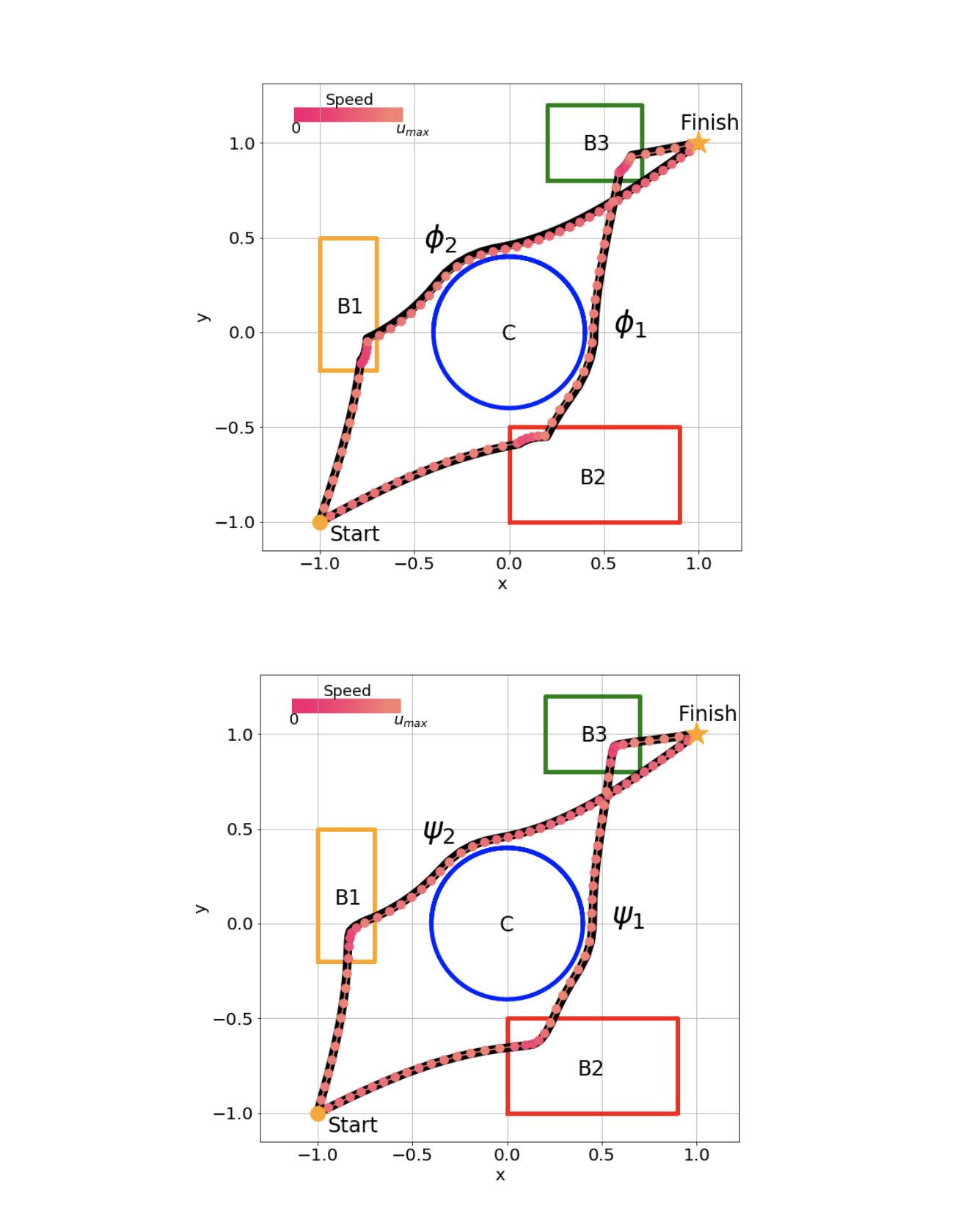
This paper presents a technique, named stlcg, to compute the quantitative semantics of Signal Temporal Logic (STL) formulas using computation graphs. This provides a platform which enables the incorporation of logic-based specifications into robotics problems that benefit from gradient-based solutions. Specifically, STL is a powerful and expressive formal language that can specify spatial and temporal properties of signals generated by both continuous and hybrid systems. The quantitative semantics of STL provide a robustness metric, i.e., how much a signal satisfies or violates an STL specification. In this work we devise a systematic methodology for translating STL robustness formulas into computation graphs. With this representation, and by leveraging off-the-shelf auto-differentiation tools, we are able to back-propagate through STL robustness formulas and hence enable a natural and easy-to-use integration with many gradient-based approaches used in robotics. We demonstrate, through examples stemming from various robotics applications, that stlcg is versatile, computationally efficient, and capable of injecting human-domain knowledge into the problem formulation. Read More
Citation: Leung, Karen, Nikos Arechiga, and Marco Pavone. "Back-propagation through STL Specifications: Infusing Logical Structure into Gradient-Based Methods." In WAFR 2020.
TRI Authors: Allan Raventos, Adrien Gaidon, Guy Rosman
All Authors: Cao, Zhangjie, Erdem Biyik, Woodrow Wang, Allan Raventos, Adrien Gaidon, Guy Rosman, and Dorsa Sadigh
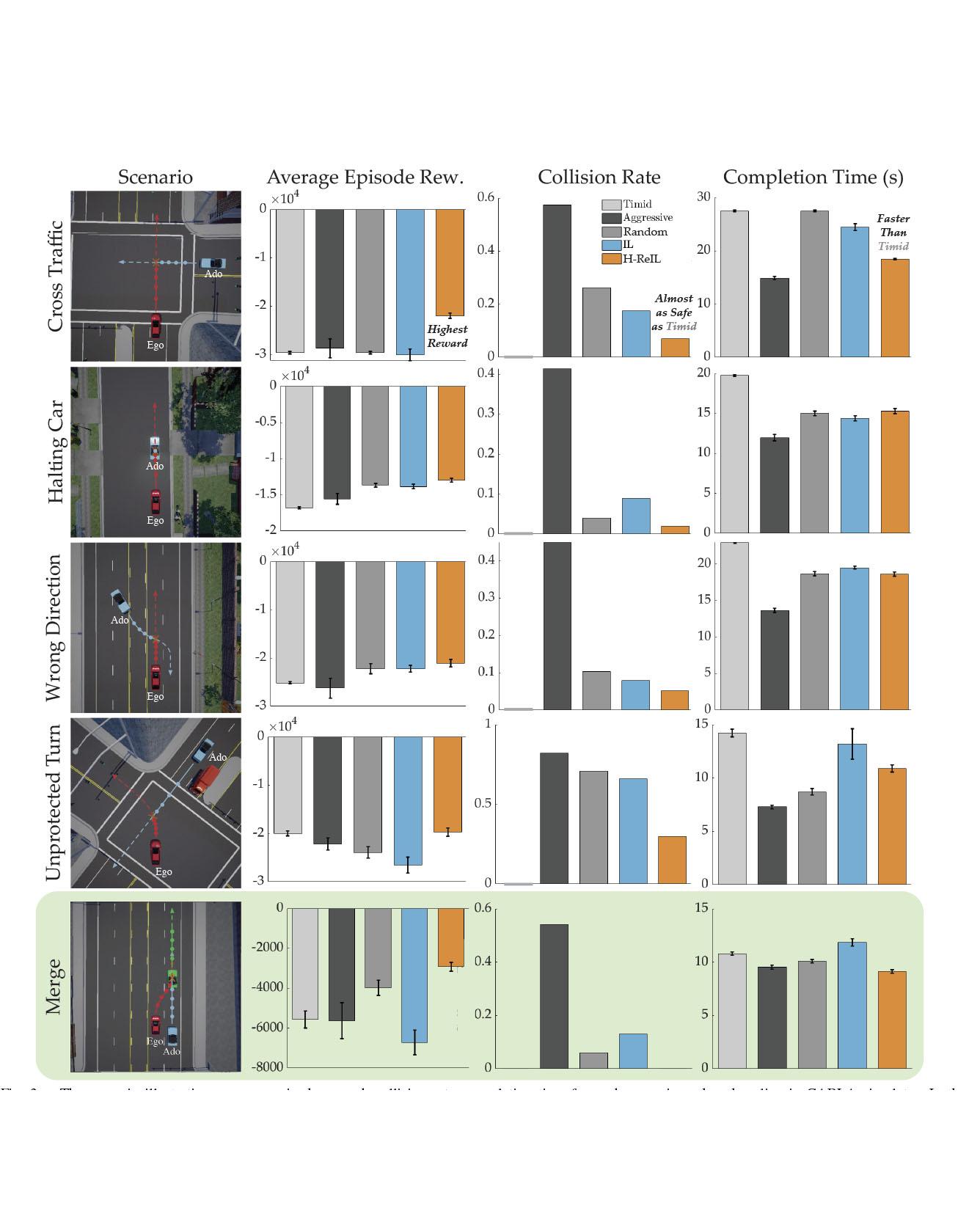
Autonomous driving has achieved significant progress in recent years, but autonomous cars are still unable to tackle high-risk situations where a potential accident is likely. In such near-accident scenarios, even a minor change in the vehicle's actions may result in drastically different consequences. To avoid unsafe actions in near-accident scenarios, we need to fully explore the environment. However, reinforcement learning (RL) and imitation learning (IL), two widely-used policy learning methods, cannot model rapid phase transitions and are not scalable to fully cover all the states. To address driving in near-accident scenarios, we propose a hierarchical reinforcement and imitation learning (H-ReIL) approach that consists of low-level policies learned by IL for discrete driving modes, and a high-level policy learned by RL that switches between different driving modes. Our approach exploits the advantages of both IL and RL by integrating them into a unified learning framework. Experimental results and user studies suggest our approach can achieve higher efficiency and safety compared to other methods. Analyses of the policies demonstrate our high-level policy appropriately switches between different low-level policies in near-accident driving situations. Read More
Citation: Cao, Zhangjie, Erdem Biyik, Woodrow Wang, Allan Raventos, Adrien Gaidon, Guy Rosman, and Dorsa Sadigh, "Reinforcement Learning based Control of Imitative Policies for Near-Accident Driving," Robotics: Science and Systems (RSS) (2020).