Featured Publications
All Publications
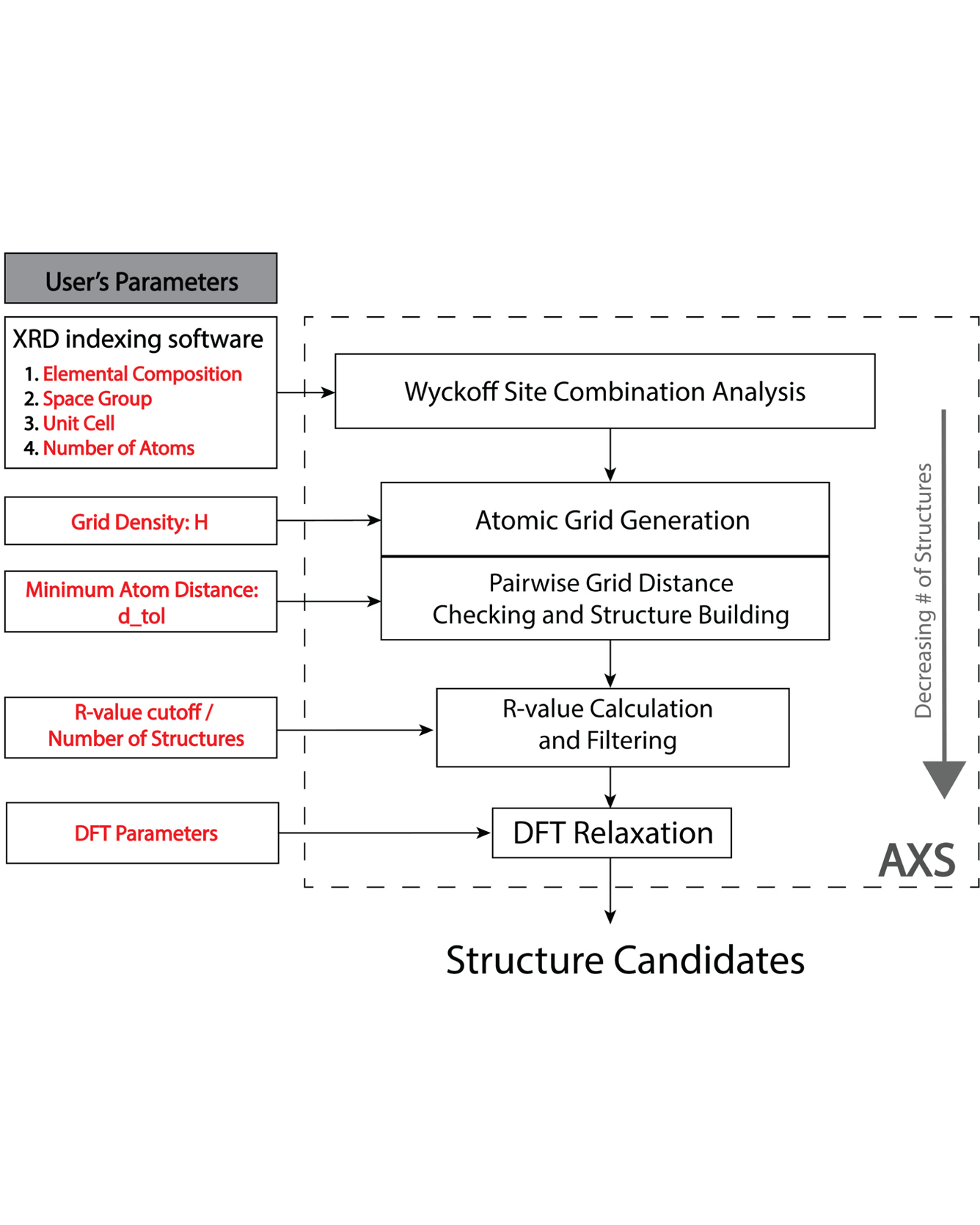
X-ray powder diffraction (XRD) is a powerful structure characterization technique, but solving unknown inorganic crystal structures from powder diffraction patterns can often be labor-intensive or speculative. We introduce an Automated XRD to Structure (AXS) solution method based on the crystal symmetry obtained from XRD patterns, an efficient search of candidate structures spanning the available degrees of freedom, and density functional theory (DFT). This methodology is completely agnostic to structural prototypes and robust in solving inorganic structures of various chemistries, crystal systems, and unit cell sizes; 92% of all crystal structures were accurately determined from the simulated XRD patterns in our benchmark set. In addition, we demonstrate the efficacy of this methodology on experimental XRD patterns by solving the crystal structures of Li8Hf6O8, Li3CrO4, and LiFeO2. READ MORE
Density functional theory (DFT) has been widely applied in modern materials discovery and many materials databases, including the open quantum materials database (OQMD), contain large collections of calculated DFT properties of experimentally known crystal structures and hypothetical predicted compounds. Since the beginning of the OQMD in late 2010, over one million compounds have now been calculated and stored in the database, which is constantly used by worldwide researchers in advancing materials studies. The growth of the OQMD depends on project-based high-throughput DFT calculations, including structure-based projects, property-based projects, and most recently, machine-learning-based projects. Another major goal of the OQMD is to ensure the openness of its materials data to the public and the OQMD developers are constantly working with other materials databases to reach a universal querying protocol in support of the FAIR data principles. READ MORE
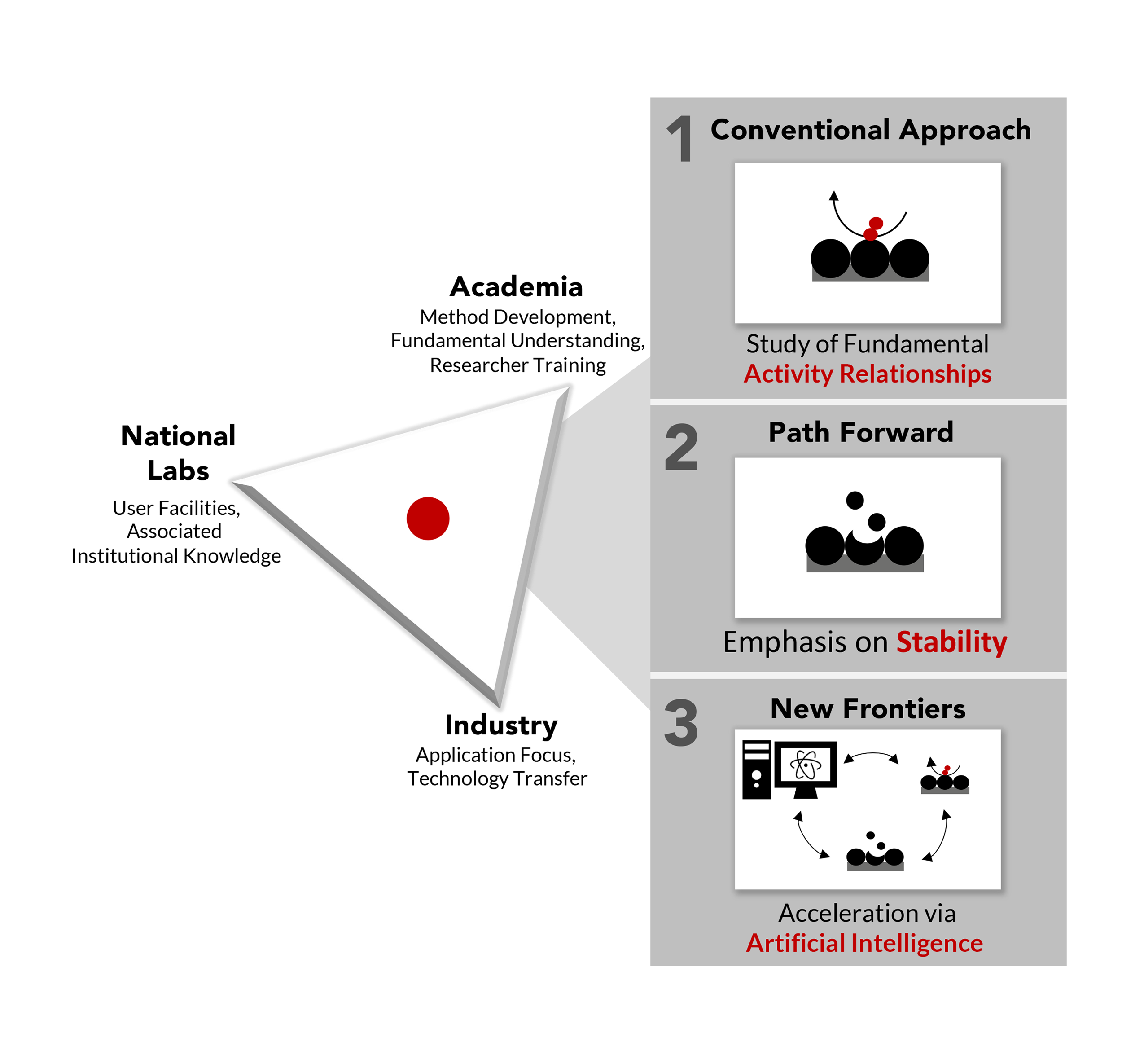
In this perspective, we highlight results of a research consortium devoted to advancing understanding of oxygen reduction reaction (ORR) catalysis as a means to inform fuel cell science. We demonstrate how targeted collaborations between different institutions from academic, national lab, and industry backgrounds and different scientific disciplines like theory, experiment, and characterization can yield unique insights into fuel cell catalysts. We comment on such insights into material designs for platinum-group-metal alloys, transition metal oxides, and non-traditional materials including metal-organic frameworks; systems that have served as the foundational building blocks for our consortium. We also motivate a renewed focus on catalyst durability in light of emerging technological requirements and paths forward in understanding in situ and operando electrochemical stability. Finally, we describe new frontiers ORR research can take and how emerging artificial intelligence tools can assist researchers in capturing data, selecting new experiments, and guiding characterization to accelerate the design and discovery of fuel cell catalysts. A main goal of sharing this perspective is to discuss the rationale for our future research plans based on our consortium work. However, we also hope to illustrate both the potential impact of a collaborative strategy with the hopes of inspiring a higher degree of Industry-Academia-National Laboratory collaboration and encourage other centers and consortiums to distill and share their findings in a similar perspective-type article. Together we hope to enable the fuel cell research community to engage in a discussion of strategies for research and accelerated development of catalysts with improved activity and stability. READ MORE
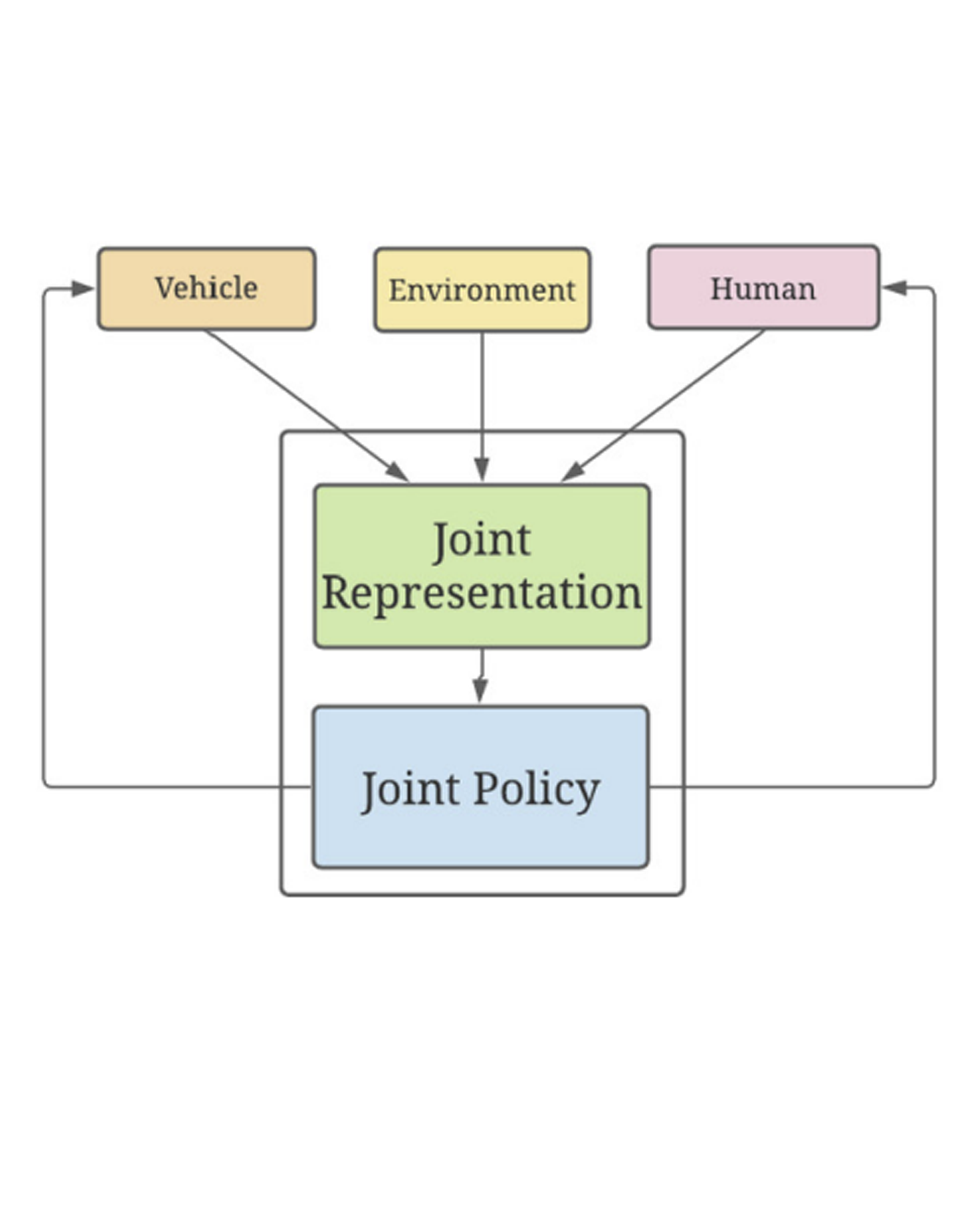
Despite the benefits of autonomous vehicles, their many challenges have made their wide scale deployment and adoption slower than hoped for. In order to help spread the potential benefits of autonomy sooner, as well as to cater to people who will continue to prefer to drive themselves while improving safety, there is a need for intelligent interaction and collaboration between increasingly automated vehicles and humans. At Toyota Research Institute, we call this Human-Centric Intelligent Driving (HCID). HCID has many technical challenges, some of which are shared with fully autonomous driving. Due to the collaborative nature between humans and machines in HCID, some of these challenges are particularly important and potentially different from fully autonomous driving. This chapter focuses on Toyota Research Institute’s (TRI) approach to addressing some of these core challenges. READ MORE
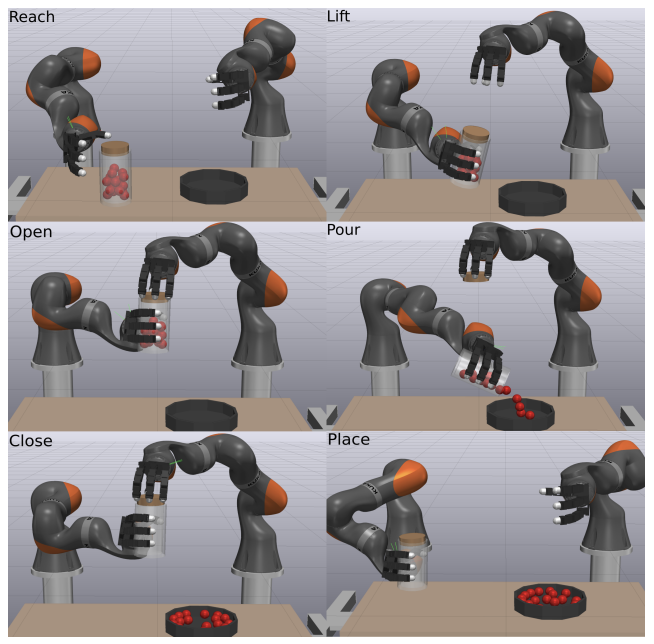
We present a convex formulation of compliant frictional contact and a robust, performant method to solve it in practice. By analytically eliminating contact constraints, we obtain an unconstrained convex problem. Our solver has proven global convergence and warm-starts effectively, enabling simulation at interactive rates. We develop compact analytical expressions of contact forces allowing us to describe our model in clear physical terms and to rigorously characterize our approximations. Moreover, this enables us not only to model point contact, but also to incorporate sophisticated models of compliant contact patches. Our time stepping scheme includes the midpoint rule, which we demonstrate achieves second order accuracy even with frictional contact. We introduce a number of accuracy metrics and show our method outperforms existing commercial and open source alternatives without sacrificing accuracy. Finally, we demonstrate robust simulation of robotic manipulation tasks at interactive rates, with accurately resolved stiction and contact transitions, as required for meaningful sim-to-real transfer. Our method is implemented in the open source robotics toolkit Drake. READ MORE
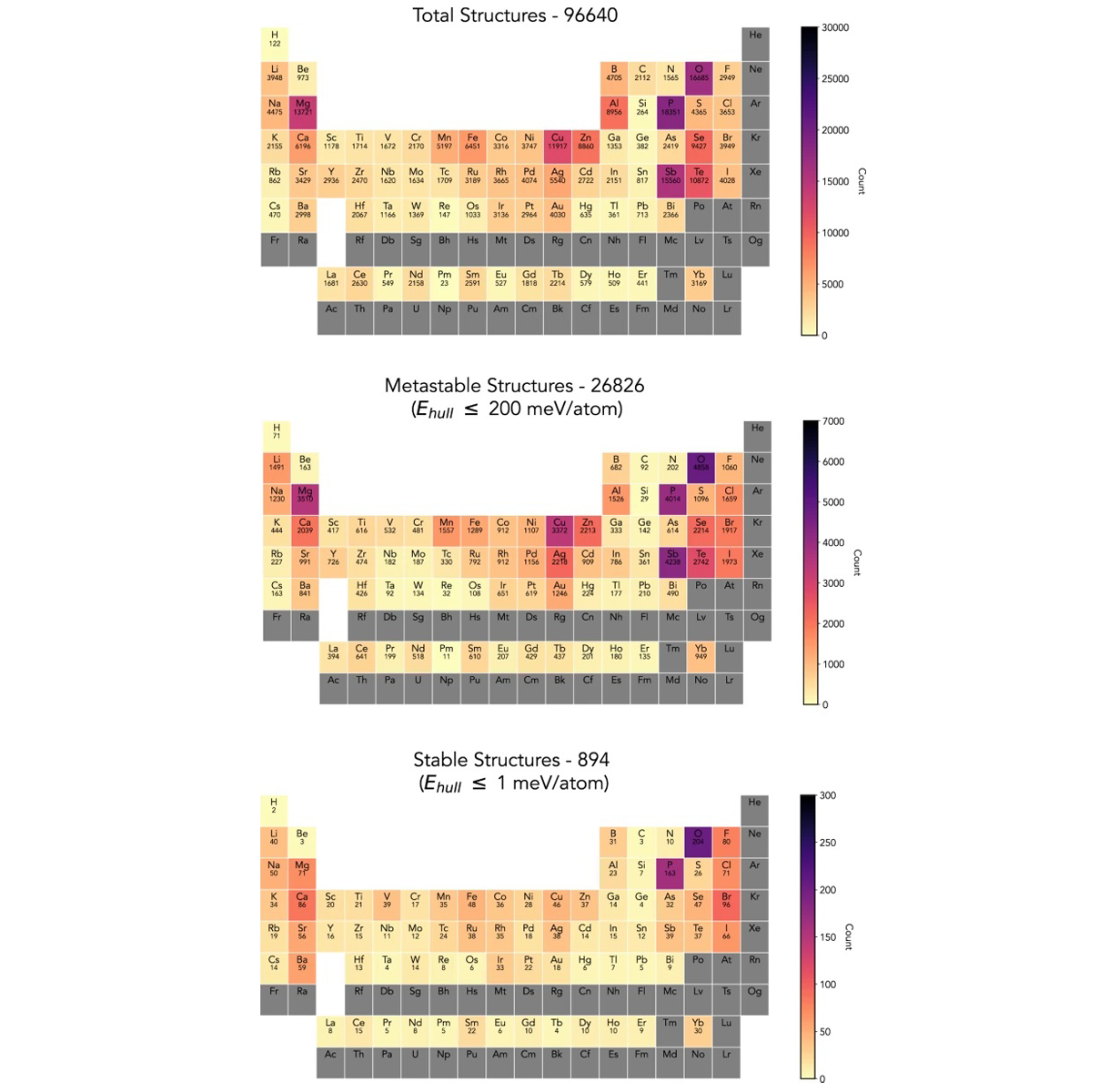
We report a dataset of 96640 crystal structures discovered and computed using our previously published autonomous, density functional theory (DFT) based, active-learning workflow named CAMD (Computational Autonomy for Materials Discovery). Of these, 894 are within 1 meV/atom of the convex hull and 26826 are within 200 meV/atom of the convex hull. The dataset contains DFT-optimized pymatgen crystal structure objects, DFT-computed formation energies and phase stability calculations from the convex hull. It contains a variety of spacegroups and symmetries derived from crystal prototypes derived from known experimental compounds, and was generated from active learning campaigns of various chemical systems. This dataset can be used to benchmark future active-learning or generative efforts for structure prediction, to seed new efforts of experimental crystal structure discovery, or to construct new models of structure-property relationships. READ MORE
This paper proposes a self-supervised objective for learning representations that localize objects under occlusion - a property known as object permanence. A central question is the choice of learning signal in cases of total occlusion. Rather than directly supervising the locations of invisible objects, we propose a self-supervised objective that requires neither human annotation, nor assumptions about object dynamics. We show that object permanence can emerge by optimizing for temporal coherence of memory: we fit a Markov walk along a space-time graph of memories, where the states in each time step are non-Markovian features from a sequence encoder. This leads to a memory representation that stores occluded objects and predicts their motion, to better localize them. The resulting model outperforms existing approaches on several datasets of increasing complexity and realism, despite requiring minimal supervision, and hence being broadly applicable. READ MORE

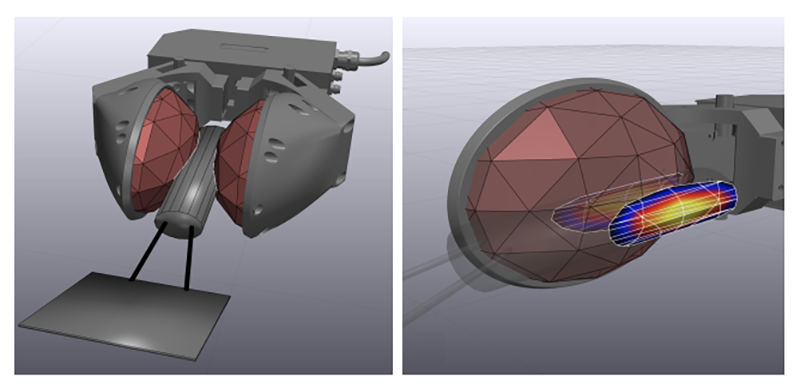
Pressure Field Contact (PFC) was recently introduced as a method for detailed modeling of contact interface regions at rates much faster than elasticity-theory models, while at the same time predicting essential trends and capturing rich contact behavior. The PFC model was designed to work in conjunction with error-controlled integration at the acceleration level. Therefore a vast majority of existent multibody codes using solvers at the velocity level cannot incorporate PFC in its original form. In this work we introduce a discrete in time approximation of PFC making it suitable for use with existent velocity-level time steppers and enabling execution at real-time rates. We evaluate the accuracy and performance gains of our approach and demonstrate its effectiveness in simulating relevant manipulation tasks. The method is available in open source as part of Drake’s Hydroelastic Contact model. READ MORE
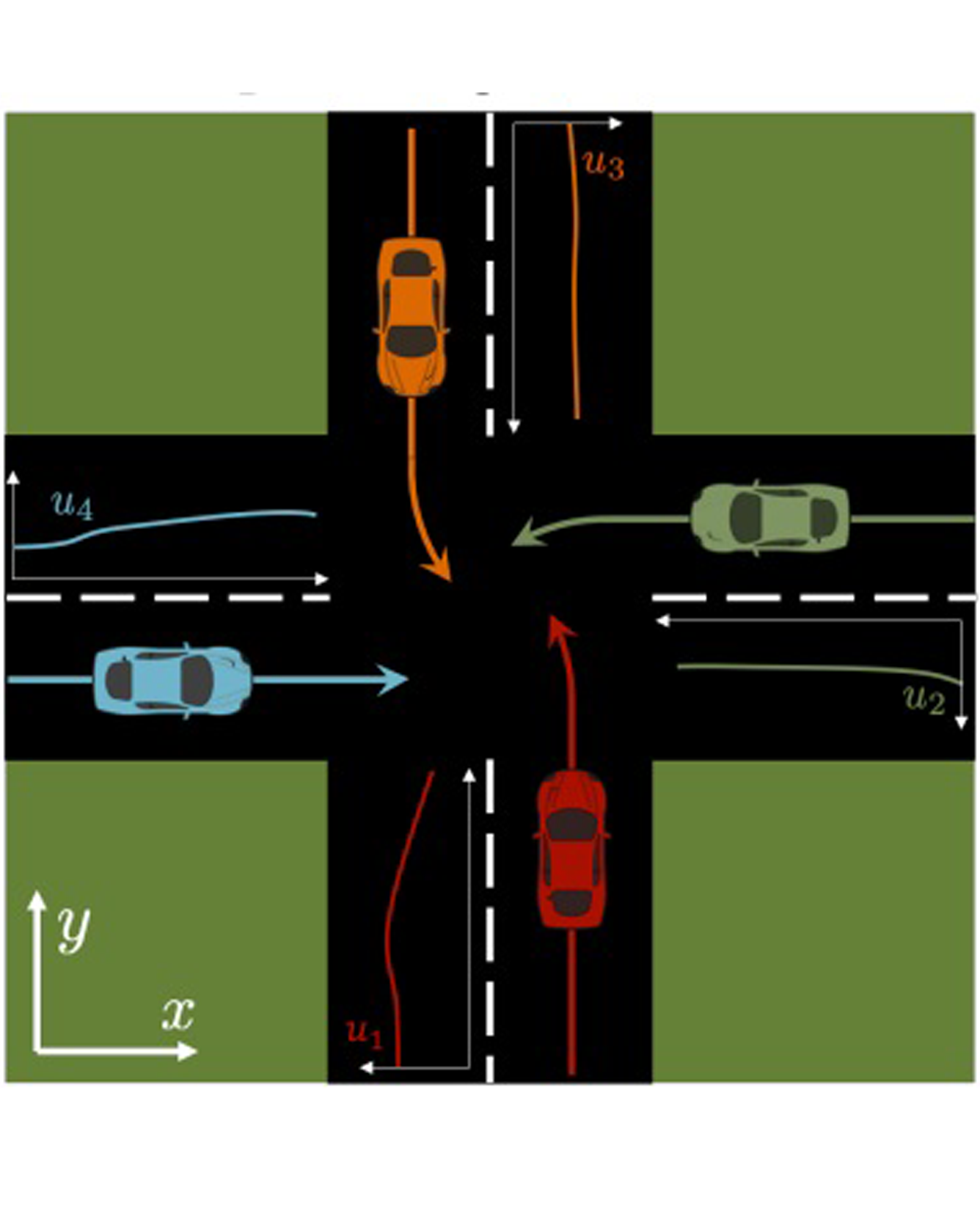
We focus on decentralized navigation among multiple noncommunicating agents at uncontrolled street intersections. Avoiding collisions under such settings demands nuanced implicit coordination. This is challenging to accomplish; the high dimensionality of the space of possible behavior and the lack of explicit communication among agents complicate prediction and planning. However, the structure of these domains often collapses the space of possible collective behavior into a finite set of modes. Our key insight is that enabling agents to reason about modes may enable them to coordinate implicitly via intent signals encoded in their actions. In this paper, we represent modes as low-dimensional multiagent motion primitives in a compact and interpretable fashion using the formalism of topological braids. Based on this representation, we derive a probabilistic model that maps past behavior of multiple agents to a future mode. Using this model, we design a decentralized control algorithm that treats navigation as uncertainty minimization over the space of modes. This algorithm enables agents to collectively reject unsafe intersection crossing strategies in a distributed fashion. We demonstrate our approach in a simulated four-way uncontrolled intersection. Our model is shown to reduce the frequency of collisions by over 65% against baselines explicitly reasoning in the space of trajectories, while maintaining comparable time efficiency in challenging scenarios. READ MORE
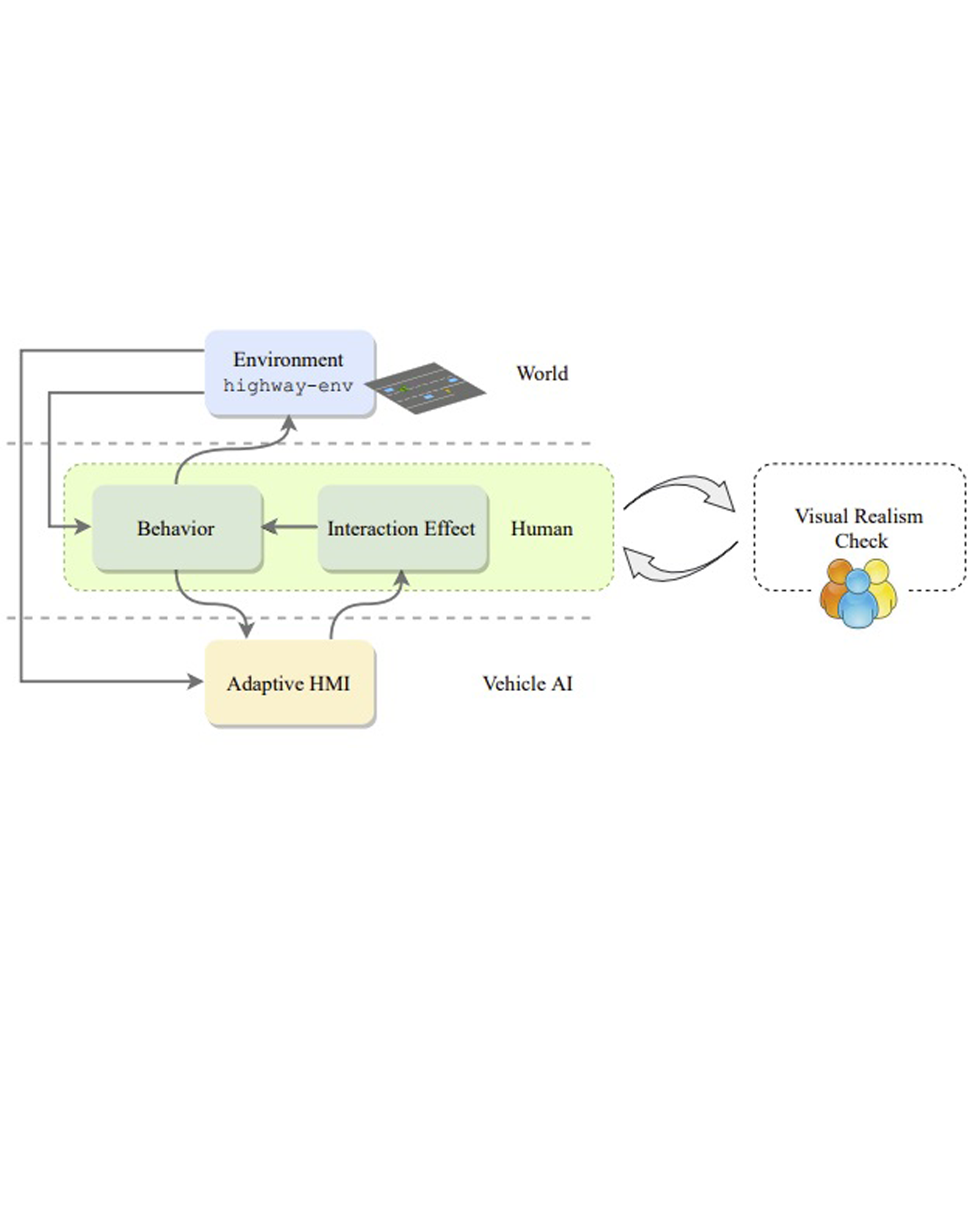
We introduce a lightweight simulation and modeling framework, HMIway-env, for studying human-machine teaming in the context of driving. The goal of the framework is to accelerate the development of adaptive AI systems which can respond to individual driver states, traits, and preferences, by serving as a data-generation engine and training environment for learning personalized human-AI teaming policies. We extend highway-env, an OpenAI Gym-based simulator environment, to enable specification of human driver behavior, and design of vehicle-driver interactions and outcomes. We describe one instance of our framework incorporating models for distracted and cautious driving, which we validate through crowd-sourced feedback, and show early experimental results toward the training of better intervention policies. READ MORE