
Featured Publications

All Publications
Atoms rearrange themselves during materials synthesis; understanding this self-organization choreography would help the design of novel synthesis recipes. Yet, the mechanisms of such phase transformations are often governed by statistically improbable atomic transitions - known as rare events - that are challenging to investigate by direct, brute-force sampling with conventional atomistic simulations. The transition-state theory framework has been successfully applied for numerous rare-event sampling techniques, which require prior knowledge of reaction coordinates to be encoded in a committor function. Here we show how E(3)-equivariant graph neural networks can be used to simultaneously learn physically appropriate reaction coordinates and committors, solely from molecular dynamics simulations near the start and end states of a reaction. This approach is applied to two dramatically different systems and associated mechanisms, namely the conformational transition in a alanine dipeptide molecule and the solid-liquid transition in the solidification of the CrFeNi metallic alloy. We demonstrated that this approach reduces the need for human intervention in designing reaction coordinates and committor functions, which may enable the high-throughput study of transition states. READ MORE

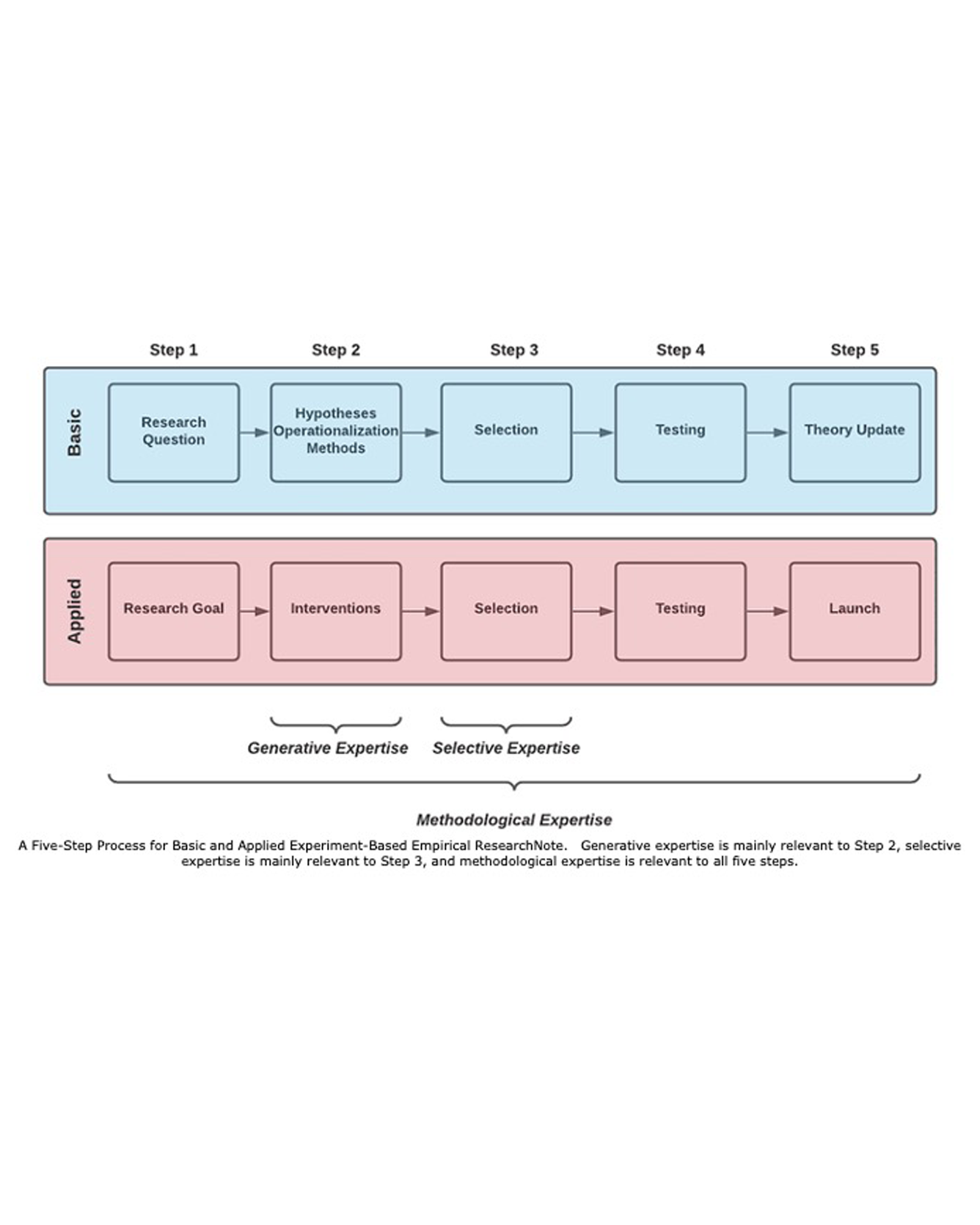
The heterogeneity of outcomes in behavioral research has long been perceived as a challenge for the validity of various theoretical models. More recently, however, researchers have started perceiving heterogeneity as something that needs to be not only acknowledged but also actively addressed, particularly in applied research. A serious challenge, however, is that classical psychological methods are not well suited for making practical recommendations when heterogeneous outcomes are expected. In this article, we argue that heterogeneity requires a separation between basic and applied behavioral methods, and between different types of behavioral expertise. We propose a novel framework for evaluating behavioral expertise and suggest that selective expertise can easily be automated via various machine learning methods. We illustrate the value of our framework via an empirical study of the preferences towards battery electric vehicles. Our results suggest that a basic multiarm bandit algorithm vastly outperforms human expertise in selecting the best interventions. READ MORE
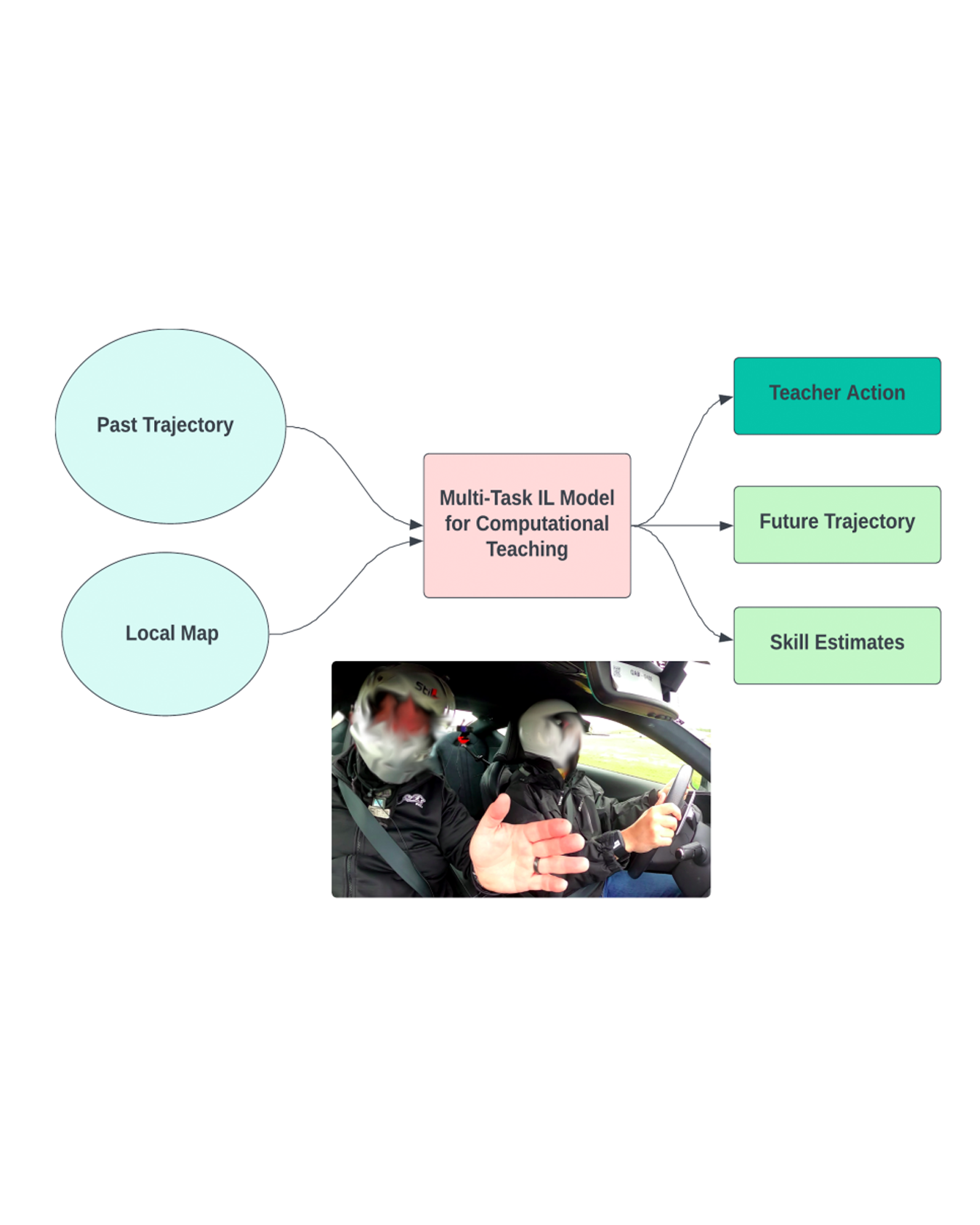
Learning motor skills for sports or performance driving is often done with professional instruction from expert human teachers, whose availability is limited. Our goal is to enable automated teaching via a learned model that interacts with the student similar to a human teacher. However, training such automated teaching systems is limited by the availability of high-quality annotated datasets of expert teacher and student interactions that are difficult to collect at scale. To address this data scarcity problem, we propose an approach for training a coaching system for complex motor tasks such as high performance driving via a Multi-Task Imitation Learning (MTIL) paradigm. MTIL allows our model to learn robust representations by utilizing self-supervised training signals from more readily available non-interactive datasets of humans performing the task of interest. We validate our approach with (1) a semi-synthetic dataset created from real human driving trajectories, (2) a professional track driving instruction dataset, (3) a track-racing driving simulator human-subject study, and (4) a system demonstration on an instrumented car at a race track. Our experiments show that the right set of auxiliary machine learning tasks improves performance in predicting teaching instructions. Moreover, in the human subjects study, students exposed to the instructions from our teaching system improve their ability to stay within track limits, and show favorable perception of the model’s interaction with them, in terms of usefulness and satisfaction. READ MORE
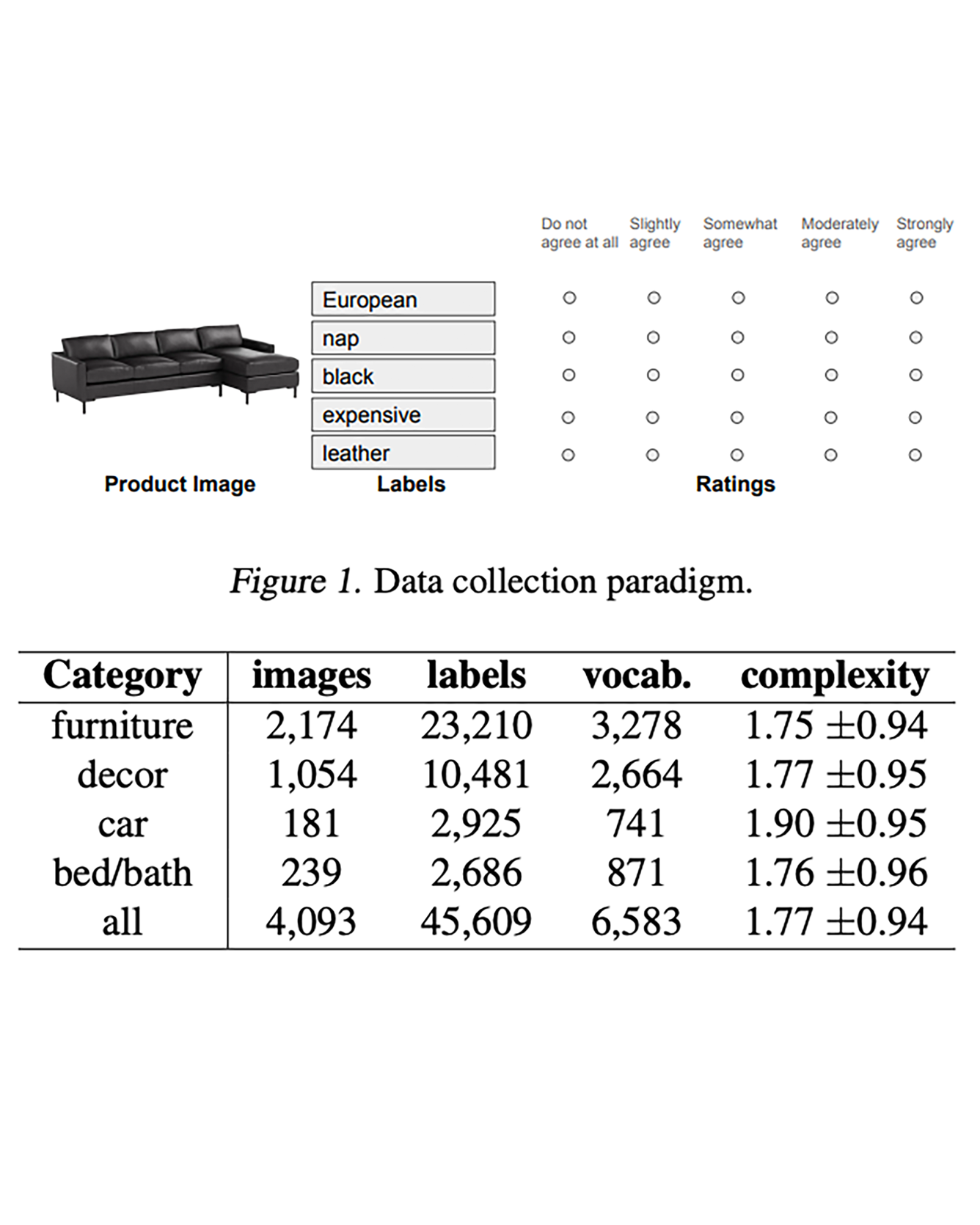
Product images (e.g., a phone) can be used to elicit a diverse set of consumer-reported features expressed through language, including surfacelevel perceptual attributes (e.g., “white”) and more complex ones, like perceived utility (e.g., “battery”). The cognitive complexity of elicited language reveals the nature of cognitive processes and the context required to understand them; cognitive complexity also predicts consumers’ subsequent choices. This work offers an approach for measuring and validating the cognitive complexity of human language elicited by product images, providing a tool for understanding the cognitive processes of human as well as virtual respondents simulated by Large Language Models (LLMs). We also introduce a large dataset that includes diverse descriptive labels for product images, including human-rated complexity. We demonstrate that human-rated cognitive complexity can be approximated using a set of natural language models that, combined, roughly capture the complexity construct. Moreover, this approach is minimally supervised and scalable, even in use cases with limited human assessment of complexity. The dataset will be made public. READ MORE
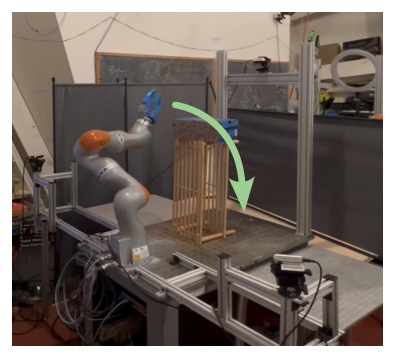
Physics-based simulation is essential for developing and evaluating robot manipulation policies, particularly in scenarios involving deformable objects and complex contact interactions. However, existing simulators often struggle to balance computational efficiency with numerical accuracy, especially when modeling deformable materials with frictional contact constraints. We introduce an efficient subspace representation for the Incremental Potential Contact (IPC) method, leveraging model reduction to decrease the number of degrees of freedom. Our approach decouples simulation complexity from the resolution of the input model by representing elasticity in a low-resolution subspace while maintaining collision constraints on an embedded high-resolution surface. Our barrier formulation ensures intersection-free trajectories and configurations regardless of material stiffness, time step size, or contact severity. We validate our simulator through quantitative experiments with a soft bubble gripper grasping and qualitative demonstrations of placing a plate on a dish rack. The results demonstrate our simulator’s efficiency, physical accuracy, computational stability, and robust handling of frictional contact, making it well-suited for generating demonstration data and evaluating downstream robot training applications. More details and supplementary material are on the website: https://sites.google.com/view/embedded-ipc. READ MORE

Drifting, a skillful driving technique involving intentional traction loss and counter-steering, traditionally demands high-speed maneuvers under high-friction conditions, posing significant risks and fear for novices. Our study explores low-µ (low friction) emulation, simulating icy conditions to facilitate drift training at safer, lower speeds. This approach not only enhances safety and mitigates fear by reducing the required speed for drifting, but also extends the time for them to react. A between-group design was employed, comparing drift training outcomes between participants trained exclusively in higher-µ conditions (control group) and those who trained initially in lower-µ conditions before transitioning to higher-µ conditions (target group). The performance was assessed through the average distance of continuous sliding, along with subjective measures of motivation and workload. The results showed that the target group achieved greater slide distances in the retention session and reported higher scores on the positive intrinsic motivation factors, suggesting enhanced performance and engagement. READ MORE

Safety and stability are essential properties of control systems. Control Barrier Functions (CBFs) and Control Lyapunov Functions (CLFs) are powerful tools to ensure safety and stability respectively. However, previous approaches typically verify and synthesize the CBFs and CLFs separately, satisfying their respective constraints, without proving that the CBFs and CLFs are compatible with each other, namely at every state, there exists control actions within the input limits that satisfy both the CBF and CLF constraints simultaneously. Ignoring the compatibility criteria might cause the CLF-CBFQP controller to fail at runtime. There exists some recent works that synthesized compatible CLF and CBF, but relying on nominal polynomial or rational controllers, which is just a sufficient but not necessary condition for compatibility. In this work, we investigate verification and synthesis of compatible CBF and CLF independent from any nominal controllers. We derive exact necessary and sufficient conditions for compatibility, and further formulate Sum-Of-Squares programs for the compatibility verification. Based on our verification framework, we also design a nominal-controller-free synthesis method, which can effectively expands the compatible region, in which the system is guaranteed to be both safe and stable. We evaluate our method on a non-linear toy problem, and also a 3D quadrotor to demonstrate its scalability. The code is open-sourced at https://github.com/hongkai-dai/compatible_clf_cbf. READ MORE
Autonomous vehicle controllers capable of drifting can improve safety in dynamic emergency situations. However, drifting involves operating at high sideslip angles, which is a fundamentally unstable operating regime that typically requires an accurate vehicle model for reliable operation; such models may not be available after environmental or vehicle parameter changes. Towards that goal, this work presents a Nonlinear Model Predictive Control approach which is capable of initiating and controlling a drift in a production vehicle even when changes in vehicle parameters degrade the original model. A neural network model of the vehicle dynamics is used inside the optimization routine and updated with online learning techniques, giving a higher fidelity and more adaptable model. Experimental validation on a full size, nearly unmodified Lexus LC500 demonstrates the increased modeling fidelity, adaptability, and utility of the presented controller framework. As the LC500 is a difficult car to drift, previous approaches which rely on physics based vehicle models could not complete the autonomous drift tests on this vehicle. Furthermore, the tires on the experimental vehicle are then switched, changing the vehicle parameters, and the capability of the controller to adapt online is demonstrated. READ MORE

Vehicles capable of operating up to the limits-of-handling can improve safety in emergency maneuvers. In light of this, this work proposes a method to robustly anticipate when a vehicle approaches its limits-of-handling and safely contain the vehicle dynamics to within these limits. First, input-to-state stable nonlinear observers are designed to estimate errors in the dynamics of a nominal vehicle model. These errors are translated into improved estimates of tire-road forces for real-time detection of tire saturation. Next, a robustifed control barrier function based quadratic program (RCBF-QP) is designed to filter control commands of a nonlinear model predictive controller that uses the nominal vehicle model for prediction. The observed model errors are incorporated into the RCBF-QP to create robustified safety-critical constraints that maintain the vehicle dynamics within the limits-of-handling. The observers and the RCBF-QP are experimentally validated on a full-scale vehicle and demonstrate the ability to retain motion control at the handling limits despite modeling errors. READ MORE
With advances in vehicle modeling and control, intelligent vehicles can increasingly utilize the full vehicle capabilities should it be necessary for safety. This paper presents a shared control approach capable of operating in the open-loop unstable state space of a vehicle. First the Maximal Phase Recoverable Parallelogram is defined as the state space where a control action exists that can stabilize the vehicle. An online approach to constructing a subset of the Maximal Phase Recoverable Parallelogram that avoids spinning out past a desired sideslip is presented. This then forms a safety envelope for a Nonlinear Model Predictive Control framework for shared control. The shared control formulation is designed to match driver inputs, unless inputs lead to safety violations such as a spin or track bound violation. If intervention is needed, the controller seeks to follow the drivers intent in a safe manner. Results for a full scale experimental vehicle executing circular steady-state drifting demonstrate the ability of the controller to operate in the open-loop unstable drifting regime and limit intervention unless there is a risk of spinning out or violating track bounds. This shared control approach is a step towards assisting a driver in using a vehicle’s full capabilities even in extreme maneuvers. READ MORE