Featured Publications

All Publications
Data-driven models are being developed to predict battery lifetime because of their ability to capture complex aging phenomena. In this perspective, we demonstrate that it is critical to consider the use cases when developing prediction models. Specifically, model features need to be classified to differentiate whether or not they encode cycling conditions, which are sometimes used to artificially increase the diversity in battery lifetime. Many use cases require the prediction of cell-to-cell variability between identically cycled cells, such as production quality control. Developing models for such prediction tasks thus requires features that do not rely on cycling conditions. Using the dataset published by Severson et al. in 2019 as an example, we show that features encoding cycling conditions boost model accuracy because they predict the protocol-to-protocol variability. However, models based on these features are less transferable when deployed on identically cycled cells. Our analysis underscores the concept of using the right features for the right prediction task. We encourage researchers to consider the usage scenarios that they are developing models for and whether or not to include cycling conditions in their models in order to avoid data leakage. Equally important, benchmarking model performance should be carried out between models developed for the same use case. READ MORE

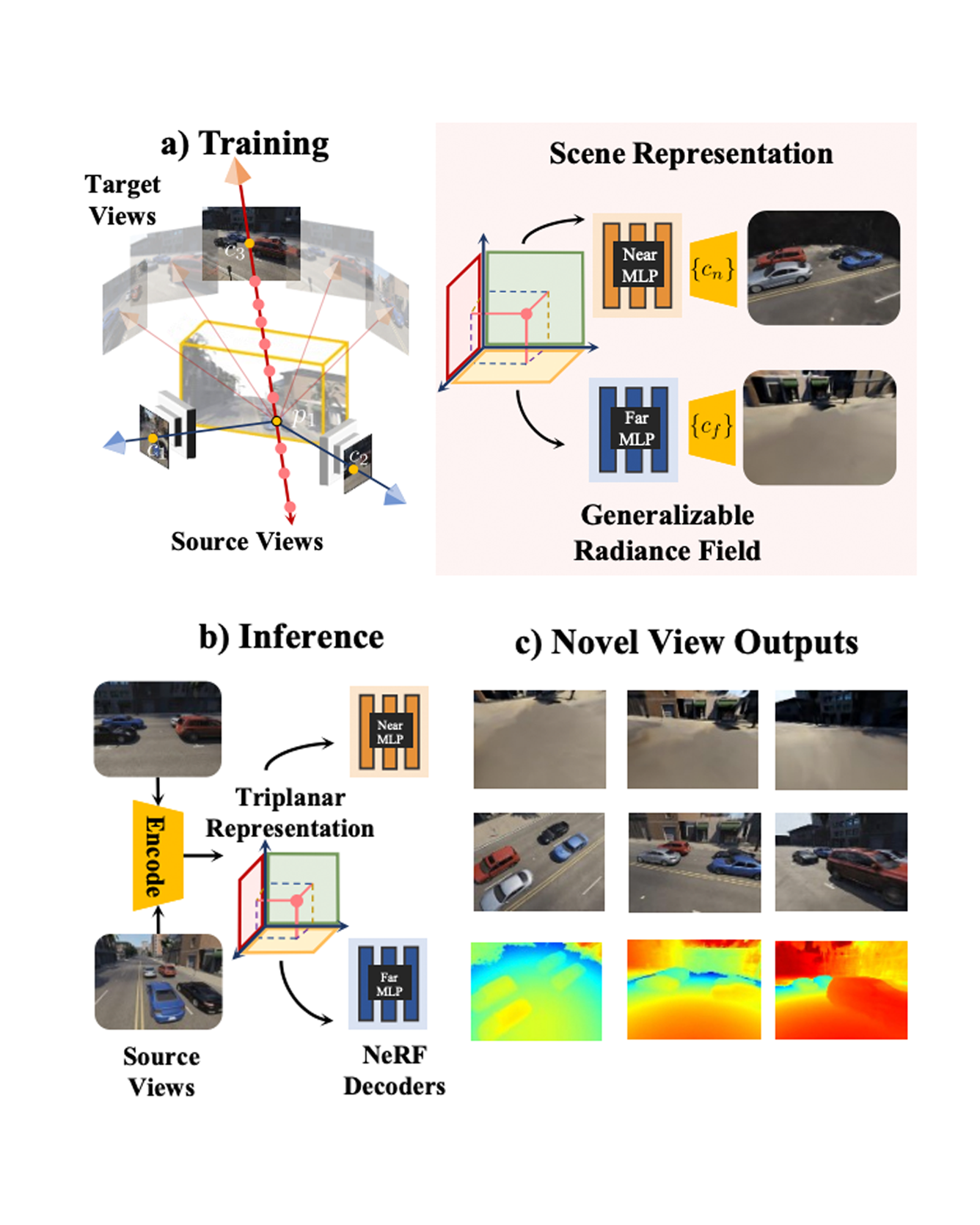
Recent implicit neural representations have shown great results for novel view synthesis. However, existing methods require expensive per-scene optimization from many views hence limiting their application to real-world unbounded urban settings where the objects of interest or backgrounds are observed from very few views. To mitigate this challenge, we introduce a new approach called NeO 360, Neural fields for sparse view synthesis of outdoor scenes. NeO 360 is a generalizable method that reconstructs 360° scenes from a single or a few posed RGB images. The essence of our approach is in capturing the distribution of complex real-world outdoor 3D scenes and using a hybrid image-conditional triplanar representation that can be queried from any world point. Our representation combines the best of both voxel-based and bird's-eye-view (BEV) representations and is more effective and expressive than each. NeO 360's representation allows us to learn from a large collection of unbounded 3D scenes while offering generalizability to new views and novel scenes from as few as a single image during inference. We demonstrate our approach on the proposed challenging 360° unbounded dataset, called NeRDS 360, and show that NeO 360 outperforms state-of-the-art generalizable methods for novel view synthesis while also offering editing and composition capabilities. Project page. READ MORE
GMP-Featurizer is a lightweight, accurate, efficient, and scalable software package for calculating the Gaussian Multipole (GMP) features (Lei & Medford, 2022) for a variety of atomic systems with elements across the periodic table. Starting from the GMP feature computation module from AmpTorch (AMPTorch, 2020), the capability of GMP-Featurizer has since been greatly improved, including its accuracy and efficiency (please refer to the Overview section for details), as well as the ability to parallelize on different cores, even machines. Moreover, this Python package only has very few dependencies that are all standard Python libraries, plus CFFI for C++ code interfacing and Ray (Moritz et al., 2018) for parallelization, making it lightweight and robust. A set of unit tests are designed to ensure the reliability of its outputs. A set of extensive examples and tutorials, as well as two sets of pseudopotential files (needed for specifying the GMP feature set), are also included in this package for its users. Overall, this package is designed to serve as a standard implementation for chemical and material scientists who are interested in developing models based on GMP features. The source code for this package is freely available to the public under the Apache 2.0 license. READ MORE
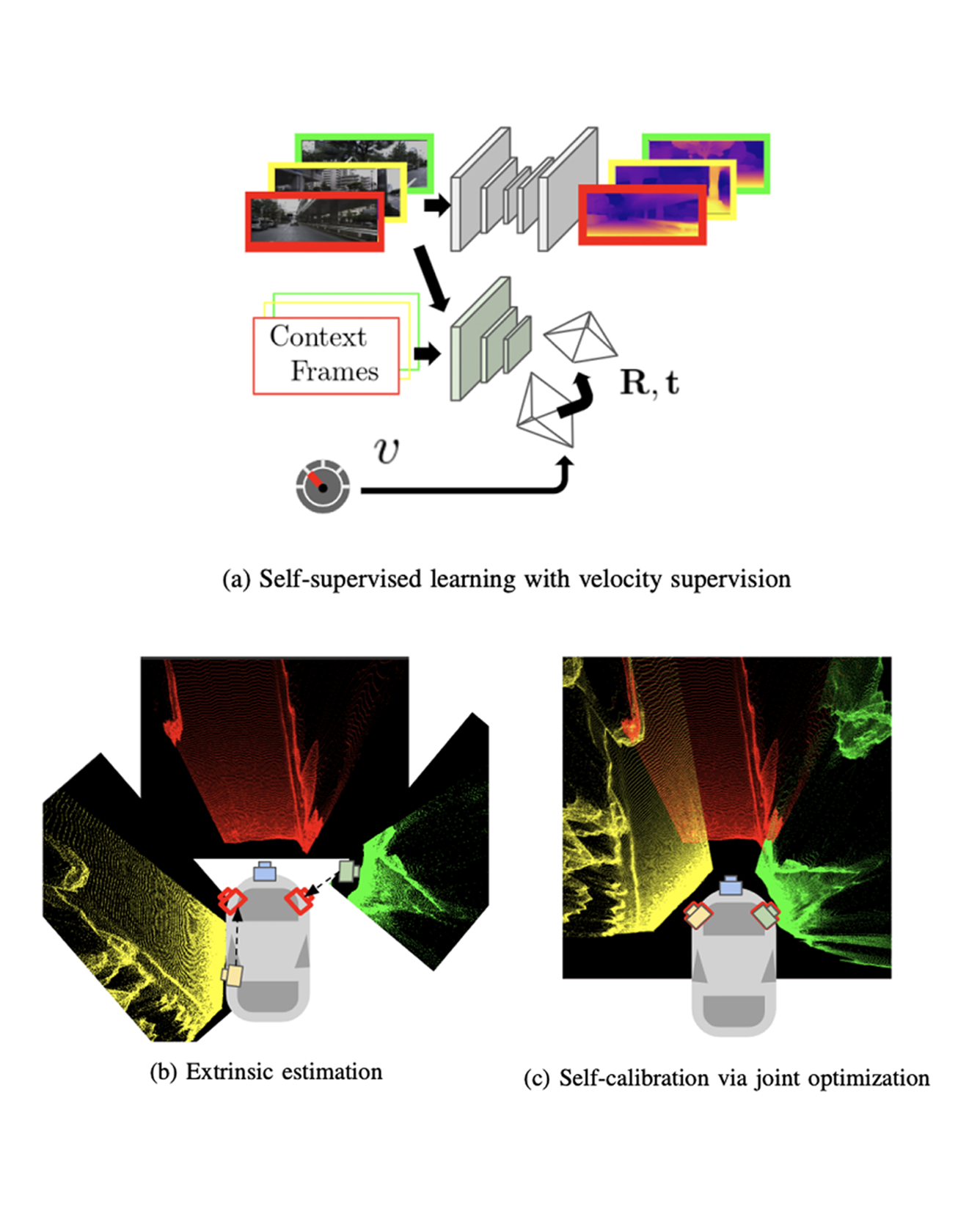
Autonomous vehicles and robots need to operate over a wide variety of scenarios in order to complete tasks efficiently and safely. Multi-camera self-supervised monocular depth estimation from videos is a promising way to reason about the environment, as it generates metrically scaled geometric predictions from visual data without requiring additional sensors. However, most works assume well-calibrated extrinsics to fully leverage this multi-camera setup, even though accurate and efficient calibration is still a challenging problem. In this work, we introduce a novel method for extrinsic calibration that builds upon the principles of self-supervised monocular depth and ego-motion learning. Our proposed curriculum learning strategy uses monocular depth and pose estimators with velocity supervision to estimate extrinsics, and then jointly learns extrinsic calibration along with depth and pose for a set of overlapping cameras rigidly attached to a moving vehicle. Experiments on a benchmark multi-camera dataset (DDAD) demonstrate that our method enables self-calibration in various scenes robustly and efficiently compared to a traditional vision-based pose estimation pipeline. Furthermore, we demonstrate the benefits of extrinsics self-calibration as a way to improve depth prediction via joint optimization. READ MORE
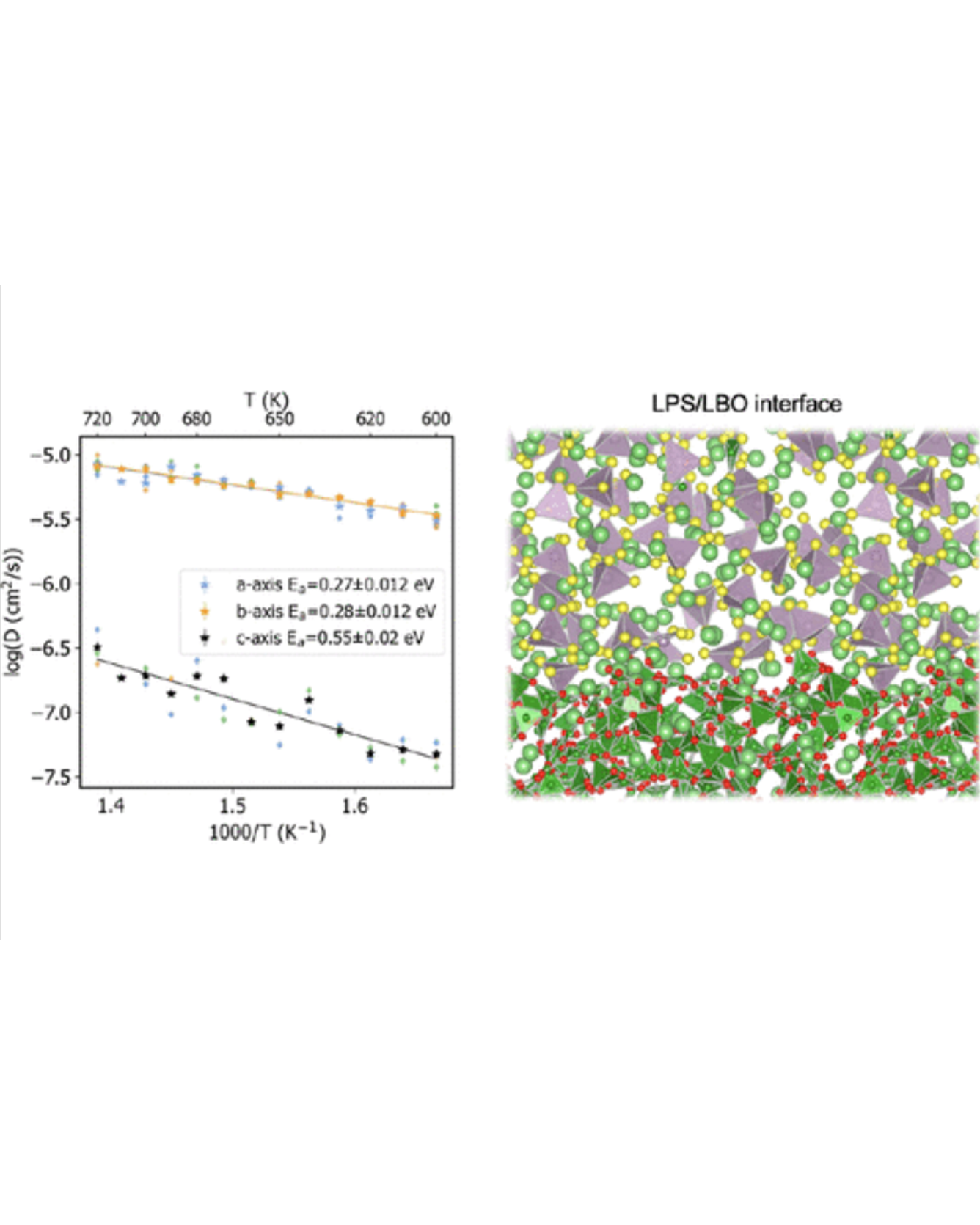
Non-crystalline solid materials have attracted growing attention in energy storage for their desirable properties such as ionic conductivity, stability, and processability. However, compared to bulk crystalline materials, fundamental understanding of these highly complex metastable systems is hindered by the scale limitations of density functional theory (DFT) calculations and resolution limitations of experimental methods. To fill the knowledge gap and guide the rational design of amorphous battery materials and interfaces, we present a molecular dynamics (MD) framework based on machine-learned interatomic potentials trained on the fly to study the amorphous solid electrolyte Li3PS4 and its protective coating, amorphous Li3B11O18. The use of machine-learned potentials allows us to simulate the materials at time and length scales that are not accessible to DFT while maintaining a near-DFT level of accuracy. This approach allows us to calculate amorphization energies, amorphous–amorphous interface energies, and the impact of the interface on lithium ion conductivity. This study demonstrates the promising role of actively learned interatomic potentials in extending the application of ab initio modeling to more complex and realistic systems such as amorphous materials and interfaces. READ MORE
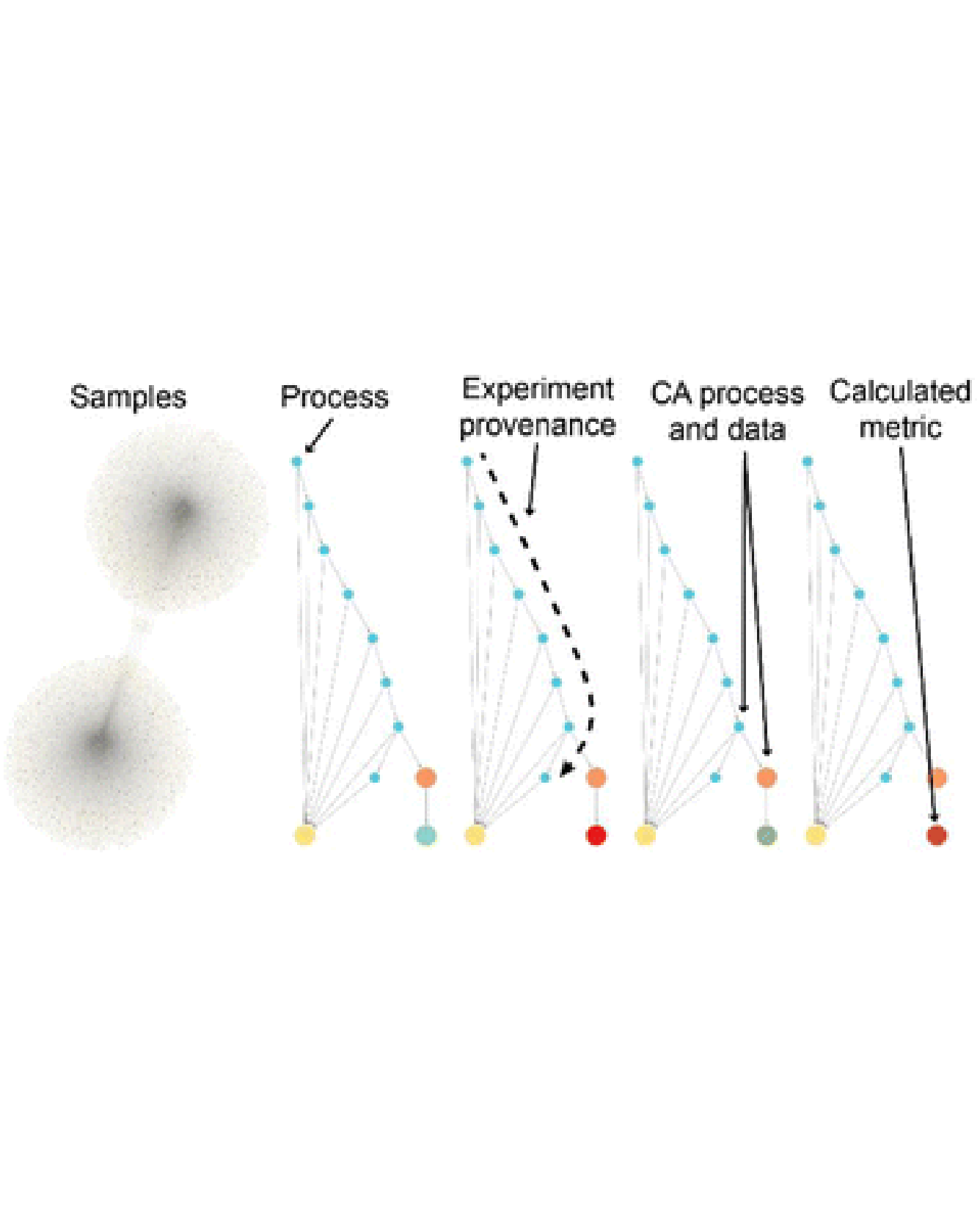
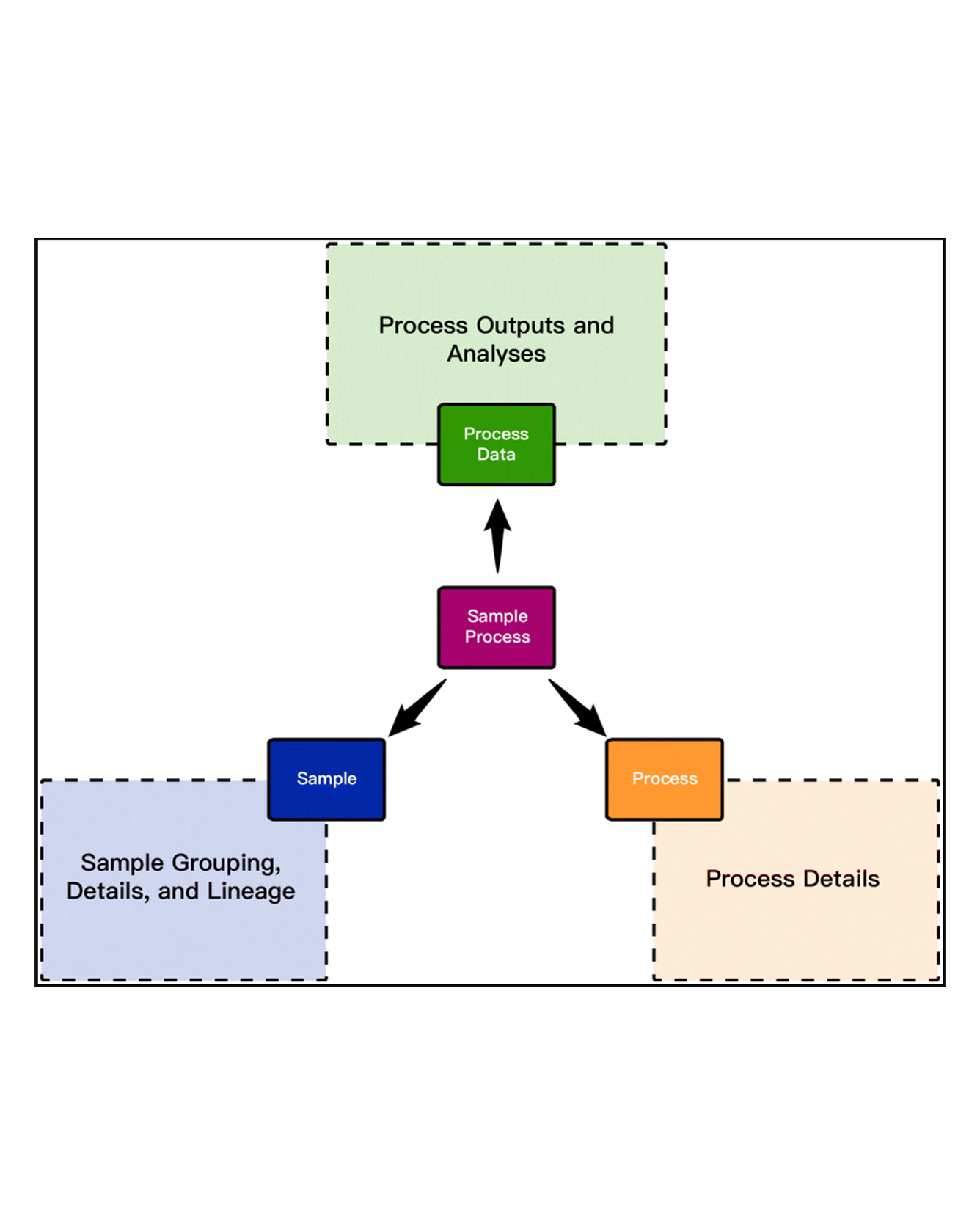
While the vision of accelerating materials discovery using data driven methods is well-founded, practical realization has been throttled due to challenges in data generation, ingestion, and materials state-aware machine learning. High-throughput experiments and automated computational workflows are addressing the challenge of data generation, and capitalizing on these emerging data resources requires ingestion of data into an architecture that captures the complex provenance of experiments and simulations. In this manuscript, we describe an event-sourced architecture for materials provenance (ESAMP) that encodes the sequence and interrelationships among events occurring in a simulation or experiment. We use this architecture to ingest a large and varied dataset (MEAD) that contains raw data and metadata from millions of materials synthesis and characterization experiments performed using various modalities such as serial, parallel, multi-modal experimentation. Our data architecture tracks the evolution of a material's state, enabling a demonstration of how state-equivalency rules can be used to generate datasets that significantly enhance data-driven materials discovery. Specifically, using state-equivalency rules and parameters associated with state-changing processes in addition to the typically used composition data, we demonstrated marked reduction of uncertainty in prediction of overpotential for oxygen evolution reaction (OER) catalysts. Finally, we discuss the importance of ESAMP architecture in enabling several aspects of accelerated materials discovery such as dynamic workflow design, generation of knowledge graphs, and efficient integration of simulation and experiment. READ MORE
Natural Language Processing (NLP), a cornerstone field within artificial intelligence, has been increasingly utilized in the field of materials science literature. Our study conducts a reproducibility analysis of two pioneering works within this domain: "Machine-learned and codified synthesis parameters of oxide materials" by Kim et al., and "Unsupervised word embeddings capture latent knowledge from materials science literature" by Tshitoyan et al. We aim to comprehend these studies from a reproducibility perspective, acknowledging their significant influence on the field of materials informatics, rather than critiquing them. Our study indicates that both papers offered thorough workflows, tidy and well-documented codebases, and clear guidance for model evaluation. This makes it easier to replicate their results successfully and partially reproduce their findings. In doing so, they set commendable standards for future materials science publications to aspire to. However, our analysis also highlights areas for improvement such as to provide access to training data where copyright restrictions permit, more transparency on model architecture and the training process, and specifications of software dependency versions. We also cross-compare the word embedding models between papers, and find that some key differences in reproducibility and cross-compatibility are attributable to design choices outside the bounds of the models themselves. In summary, our study appreciates the benchmark set by these seminal papers while advocating for further enhancements in research reproducibility practices in the field of NLP for materials science. This balance of understanding and continuous improvement will ultimately propel the intersecting domains of NLP and materials science literature into a future of exciting discoveries. READ MORE

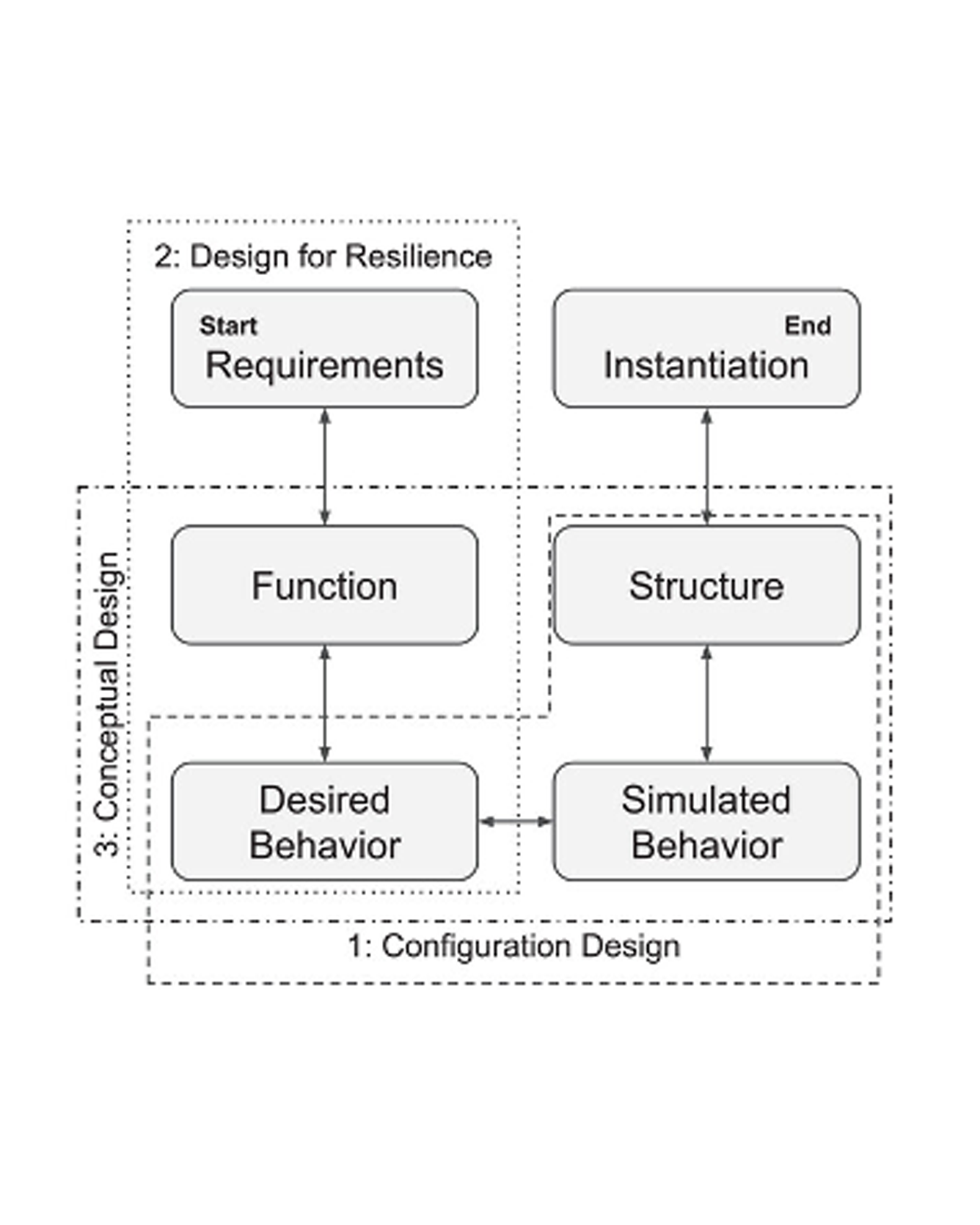
Anticipatory thinking (AT) and design have many commonalities. We identify three challenges for all computational AT systems: representation, generation, and evaluation. We discuss how existing artificial intelligence techniques provide some methods for addressing these, but also fall significantly short. Next, we articulate where AT concepts appear in three computational design paradigms: configuration design, design for resilience, and conceptual design. We close by identifying two promising future directions at the intersection of AT and design: modeling other humans and new interfaces to support human decision-makers. READ MORE
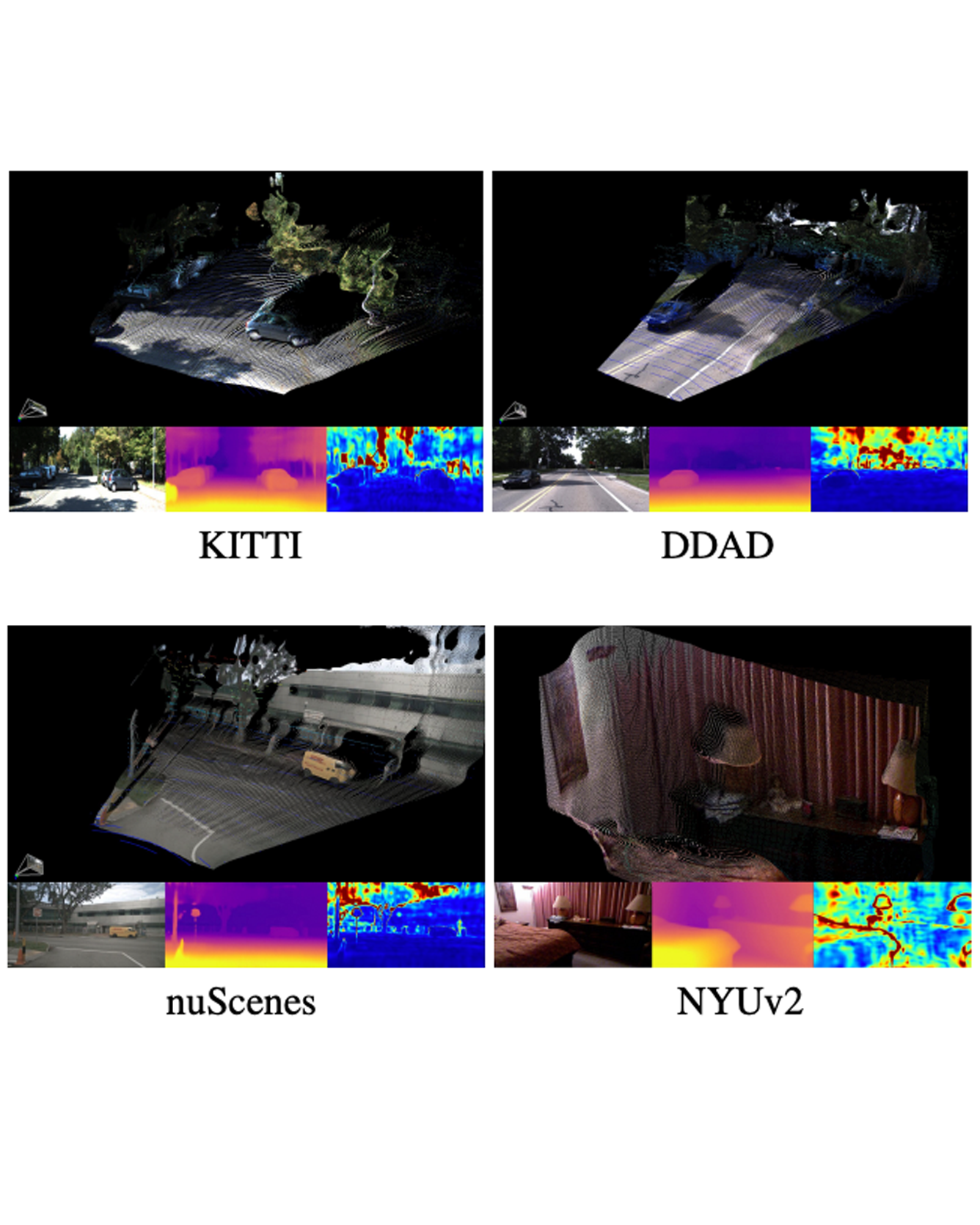
Monocular depth estimation is scale-ambiguous, and thus requires scale supervision to produce metric predictions. Even so, the resulting models will be geometry-specific, with learned scales that cannot be directly transferred across domains. Because of that, recent works focus instead on relative depth, eschewing scale in favor of improved up-to-scale zero-shot transfer. In this work we introduce ZeroDepth, a novel monocular depth estimation framework capable of predicting metric scale for arbitrary test images from different domains and camera parameters. This is achieved by (i) the use of input-level geometric embeddings that enable the network to learn a scale prior over objects; and (ii) decoupling the encoder and decoder stages, via a variational latent representation that is conditioned on single frame information. We evaluated ZeroDepth targeting both outdoor (KITTI, DDAD, nuScenes) and indoor (NYUv2) benchmarks, and achieved a new state-of-the-art in both settings using the same pre-trained model, outperforming methods that train on in-domain data and require test-time scaling to produce metric estimates. READ MORE
Materials knowledge is inherently hierarchical. While high-level descriptors such as composition and structure are valuable for contextualizing materials data, the data must ultimately be considered in the context of its low-level acquisition details. Graph databases offer an opportunity to represent hierarchical relationships among data, organizing semantic relationships into a knowledge graph. Herein, we establish a knowledge graph of materials experiments whose construction encodes the complete provenance of each material sample and its associated experimental data and metadata. Additional relationships among materials and experiments further encode knowledge and facilitate data exploration. We illustrate the Materials Experiment Knowledge Graph (MekG) using several use cases, demonstrating the value of modern graph databases for the enterprise of data-driven materials science. READ MORE